专注起重机安全监控管理系统为工业安全行业保驾护航!


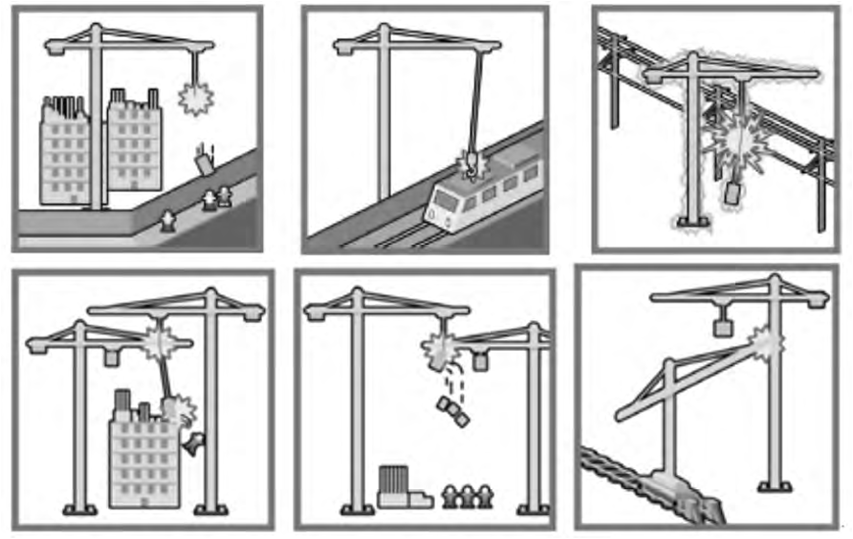
塔式起重机作为广泛应用的大型起重设备,其作业空间大,工作效率高,在建筑领域得到广泛的应用。但是在施工过程中人员伤亡和设备损毁的事故也屡屡发生,给社会带来了重大的损失[1]。塔式起重机在作业过程中存在的隐患主要有:单台塔机的安全隐患、单台塔机与其他物体的碰撞隐患、塔机群交叉作业互碰撞隐患及无证操作等,塔机各种安全事故如图
1 所示
本项目研发了新一代区域塔机安全监测预警系统,采用最新科技,弥补现有监测系统的不足,集成化程度高,提供多种后台功能,整体地提升了塔机的安全性能。
1 主要研究内容
1.1 技术原理
塔机安全监控系统技术路线如图2 所示。
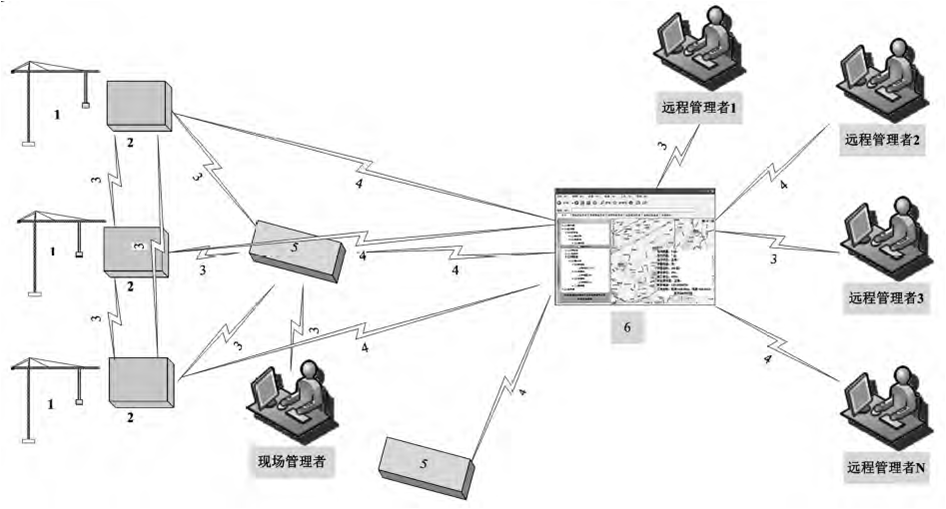
在区域内的塔式起重机l 上安装一安全监测仪2,安全监测仪2 设有多种传感器,将起
重机l 的空间运动状态数据、荷载状态数据、自身结构状态数据以及监控视频运行数据通过通信模块发至现场的监测控制平台5 和远处的后台信息管理平台6 存储,同时接收该区域内其余塔式起重机l 的数据并进行处理,从而拉制自身起重机的运行状态,并设有预警模块。安全监测仪2 包括各种传感器(指纹模块、倾角传感器、风速传感器、重量传感器、高度传感器、幅度传感器、角度传感器、制动控制器、安全控制器、网络监控器等)、智能数据采集分析芯片、视频摄像头、通讯模块和预警模块,智能数据采集分析芯片接收传感器和视频摄像头的各种数据,经处理后能通过近距通讯线路(如射频技术、无线传输技术、有线传输技术)传输到现场的监测控制平台5,也能通过远距通讯线路(如GPRS、CDMA、3G 等数字信技术、Internet /lntranet 网络技术)传输到远处的后台信息管理平台6存储,同时接收现场的监测控制平台5 和远处的后台信息管理平台6 发来的该区域中其余塔式起重机1的数据,塔式起重机安全监测仪基于测量得到的本机数据以及接收到的其他塔式起重机的监测数据,结合智能分析计算实现对塔式起重机自身安全危险、与障碍物(包括有建筑物、高压线、遒路、限制保护区、限制作业边界等)碰撞危险、与多塔式起重机协作碰撞危险的监测和判别,并能依据判别结果采用声、光、图像、通讯等方式实现预警,并对塔式起重机的运动状态进行控制,从而有效避免事故的发生。同时能够将监测数据实时存储在塔式起重机安全监测仪上,实现黑匣子功能,为掌握塔式起重机运行状态及事故认定提供可靠依据。现场的监测控制平台5 是一个信息控制中心,其能够实现对局域内多台塔式起重机安全监测仪的控制及组网。塔式起重机安全监测仪能够将塔式起重机作业范围内的建筑物、高压线、道路、限制保护区、限制作业边界等虚拟成不同类型的障碍物,从而能够避免塔式起重机与障碍物碰撞危险的发生。现场的监测控制平台5 能够基于近距通讯线路实现与多台塔式起重机安全监测仪间的数据通讯,同时也能基于远距通讯线路实现与塔式起重机后台信息管理平台6 间的数据通讯。同时能够将监测数据实时存储在现场的监测控制平台5 上,实现黑匣子功能,为掌握塔式起重机运行状态及事故认定提供可靠依据[2]。塔式起重机后台信息管理平台6 以信息技术、全球定位技术以及地理信息系统技术为基础,用于对区域内多台塔式起重机的安全状态进行监测和记录,能够实现对塔式起重机安全监测仪的实时监控、历史运行记录查询、远程控制等功能。从而实现更大范围的对区域内塔式起重机安全状态的远程监测。1.2 塔机的防碰撞算法研究本项目采用高安全系数的塔机防碰撞算法,有效地防止了塔机与周围固定障碍物的碰撞以及2 座塔机之间的相互碰撞,保障了塔机安全运行作业。高安全系数的塔机防碰撞算法主要分为2 类:一种类型是防止塔机与周围固定障碍物的碰撞,第二种类型是防止2 座塔机之间的相互碰撞。
防止塔机与周围固定障碍物的碰撞假设塔机与障碍物位置如图3 所示。
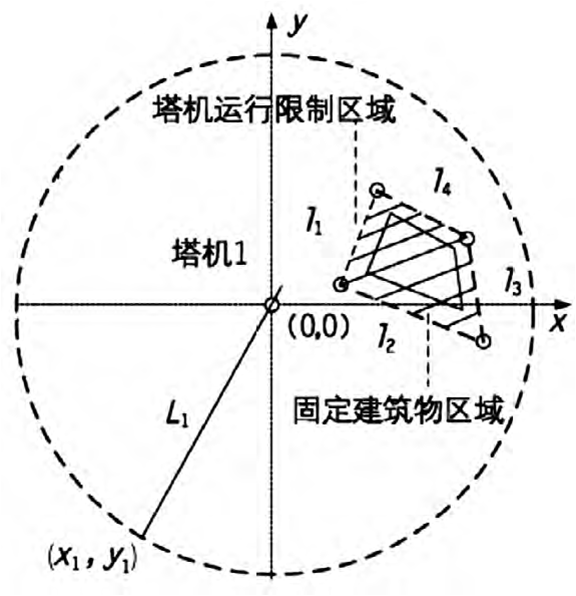
将固定建筑物的模型进行一定程度的简化,在周围加上一定的裕量后等效为棱柱体结构。图中的l1,l2,l3,l4 分别为棱柱体的4 个侧面,用方程(1)表示为:
y=a1 x+b1
y=a2 x+b2
y=a3 x+b3
y=a4 x+b4
z=h
塔机1 在运行过程中,根据臂架的长度、转角和吊重的位置等信息,计算出塔机1 可能与限制区域发生碰撞的最远点的坐标(x’,
y’,
z’)。塔机1 可能与限制区域发生碰撞的最远点的坐标是指当塔机起重臂高度低于建筑物高度时起重臂最远点的坐标,而当塔机起重臂高度高于建筑物高度时则是指吊重的坐标。若可能碰撞的最远点(x’,y’,z’)满足下述方程式(2):
y’<a1 x’+b1
y’<a2 x’+b2
y’<a3 x’+b3
y’<a4 x’+b4
z’< h
则说明塔机1 进入了干涉区域,此时应立刻报警,并立刻停止向建筑物靠近方向的运动。具体的软件实现流程如图4 所示。防止2 座塔机之间的相互碰撞防止2 座塔机之间的相互碰撞主要包括2 个方面:(1)塔机高度相同时,起重臂之间的碰撞;(2)塔机高度不同时,高位塔机的起升绳、吊钩与低位塔机起重臂之间的碰撞[3]。本系统采用了一种Zigbee 无线技术进行组网通信,同一个工作区域中的塔机按照约定的协议向网络中发送含有自身ID、角度等信息的数据,同时接受可能与自身发生干涉的塔机数据,并建立数学模型。当塔机检测到自身运行区域中存在可能发生干涉的塔机时,立即发出警报。当塔机运行到干涉区域,并且检测到此时该区域中还有其他塔机时,若2 座塔机高度一致,则停止该方向的运动;若2 座塔机高度不一致,当高位塔机吊重的高度大于低位塔机的臂架高度或者2 座塔机吊重到各自中心距离之和小于2 座塔机回转中心之间距离时,可继续运行,否则就停止该方向的运动判断塔机是否运行到干涉区域的算法是计算塔机1 臂架前端与塔机2 回转中心的距离。如果这个距离小于塔机2 臂架的长度,则认为塔机1 进入了2 座塔机的干涉区域。假设2 座塔机位置。
2 台塔机回转中心的坐标分别是(0,0)和(a,b),塔机臂架长度分别为L1,L2,塔机臂架端点坐标分别为(x1,y1)和(x2,y2)。如果塔机1 的臂架端点(x1,y1)与塔机2 的回转中心(a,b)满足以下方程式(3):姨(x1-a)2+(y1-b)2 <L2则说明塔机1 进入了2 座塔机的干涉区域。同理也可判断塔机2 是否进入2 座塔机的干涉区域。这部分软件实现流程如图6 所示。
本项目能够实现对塔机运行状态的全方位监测及多种不同危险的预警,能够有效提升塔机的安全水平,减少事故的发生。其系统特点主要为:
(1)塔机运行状态监测、显示及记录功能。包括有塔机的幅度、高度、起重量/力矩、回转角、风速及倾角数据,对塔机运行过程中的数据可以记录在本地监控仪中,同时也可以存储在远端的服务器中,满足塔机安全事故分析及塔机运行规律分析的要求。
(2)塔机防碰撞功能。在对塔机幅度位置、高度位置及回转位置实时检测的同时,通过zigbee 无线组网技术将同一施工环境下的多台塔机组成一个无线监控网络,使不同塔机的运行状态数据可以在不同的塔机间传递。每个塔机可以基于本塔机及其他塔机的数据进行防碰撞计算,实现距离预警和高度预警,并基于防碰撞的计算结果进行语音报警,在紧急情况下切断不安全方向动作的电源,避免碰撞事故的发生



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
