专注起重机安全监控管理系统为工业安全行业保驾护航!


履带起重机智能控制系统能实时监测系统运 行状态,对故障进行在线监测与预警,变被动安全 保护为主动安全保护,变被动维修为主动维护,可 大幅降低误操作及故障发生率,减少事故、延长设 备使用寿命,并能提高故障诊断与维护的快速性和 准确性,因此,履带起重机智能控制技术的应用研 究,具有重要的理论价值和实际意义。 履带起重机智能控制系统发展现状。
在履带起重机控制系统智能化方向上,国外 各大生产商都在不断研发自己的核心技术,提升产 品的档次和竞争力。德国利勃海尔公司率先在履带 起重机上配备全球卫星定位通讯系统,并将模糊控 制应用在吊钩防摆控制上。英国一些企业还在起重 机上装有微机自诊断监控系统,能提供大部分常规 维护检查内容,如钢丝绳状况、减速器油温油位、 起重机载荷、应力和振动情况、制动器摩擦衬片的 寿命及温度状况等。 国内一些企业也对履带起重机的智能控制技 术进行了大量研究,近几年一些文献中已提出了有 关履带起重机远程故障诊断、电子监控智能终端、 起重机工作数据记录器等系统的设计。 未来履带起重机将向着智能化、人性化、节 能化发展。在这种趋势下,各种电子监控系统、作 业时在线故障检测和诊断、实时数据和语音记录等 是今后履带起重机智能化发展的重要研究领域2 履带起重机控制系统总体结构及功能
履带起重机控制系统结合了总线技术、传感 器技术、人工智能、无线传输等先进技术,包括动 力系统控制、液压系统控制、力矩限制器及安全监 控、辅助设备操作等。履带起重机控制系统结构如 图1所示。
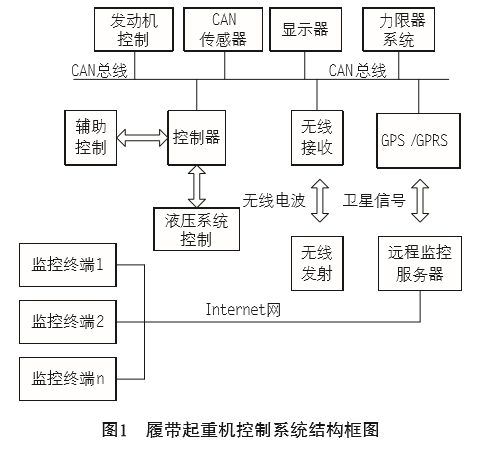
控制系统的核心为可编程的控制器(PLC)和 显示器(HMI)。控制器、显示器、发动机控制模块(ECU)、无线遥控、GPS/GPRS等均通过CAN 总线进行实时通讯及交换数据。系统中的按钮、开 关等元件提供开关量信号,电位器、传感器等提供 模拟量信号,分别通过输入口进入控制器。控制器 经过内部计算处理后,通过输出口控制液压系统中 的比例电磁阀、开关电磁阀及指示装置等。操作者 可通过显示器查看起重机的各项工作参数,并通过 显示器输入设定参数。 控制系统最终实现的是智能控制,主要包括 智能化操作、安全智能控制、节能智能控制、远程 监控和故障智能诊断等功能。 3 履带起重机智能控制关键技术 3.1 智能化操作技术 智能化操作主要体现在速度控制、无线遥 控、吊装自动定位和平衡重位置自动调节等方面。
(1)速度控制技术。 对于履带起重机而言,由于臂架长、起重量 大,负载和自重的惯量对结构安全的影响较大,因 此对于动作速度和加速度的控制要求较高,特别是 对大吨位履带起重机更为重要。操作者可以通过发 动机油门以及手柄的开度实现对速度和加速度的控 制,但是存在人为风险,操作者难以把握操作的程 度,因此速度控制的智能化是很必要的。 速度和加速度控制可通过检测工况和负荷率 进行智能控制,可在控制程序中根据工况和负荷率 设定相应的速度和加速度并进行控制,即使操作者 猛烈操作依然能保证各种动作的平稳加速,并维持 安全的速度。除了程序设定之外,还可增加速度选 择旋钮,进行人工速度选择,在程序设定的范围内 选择更合适的速度,以满足操作者的需要。
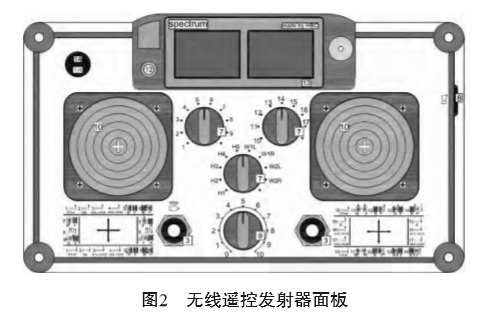
(2)无线遥控技术。 射频无线传输工作于433/868/915MHz 3个国 际标准规定可免费使用的频道,其采用GFSK(曼 彻斯特)编码/解码方式,可自动产生字头和CRC 校验码,使用SPI接口与微控制器进行通信,配置 非常方便。在空旷地带输出距离可达500m,适用 于无线数据通信、遥控遥测和工业数据采集等诸多 领域。 采用跳频通信的方式可以有效地降低外部干扰的影响,在每个频段提供多达29个频道。当监测 到当前信道的持续干扰时,无线遥控器可跳转到受 同一干扰源的干扰概率较小的信道;如果干扰来自 其他的跳频系统,则不进行跳频。 履带起重机的无线遥控系统主要通过射频无 线传输和CAN总线来实现,其工作原理如图1所 示。无线发射器通过无线电波(射频)向无线接 收器发送操作指令,无线接收器收到指令通过解 析、校验后再通过CAN总线发送给起重机的控制 单元,控制单元经过处理后输出控制指令;同时控 制单元也将起重机力限器的关键参数逆向发送给无 线发射器显示。无线遥控发射器面板如图2所示, 可以实现整车动作的无线操作和关键参数的监视。
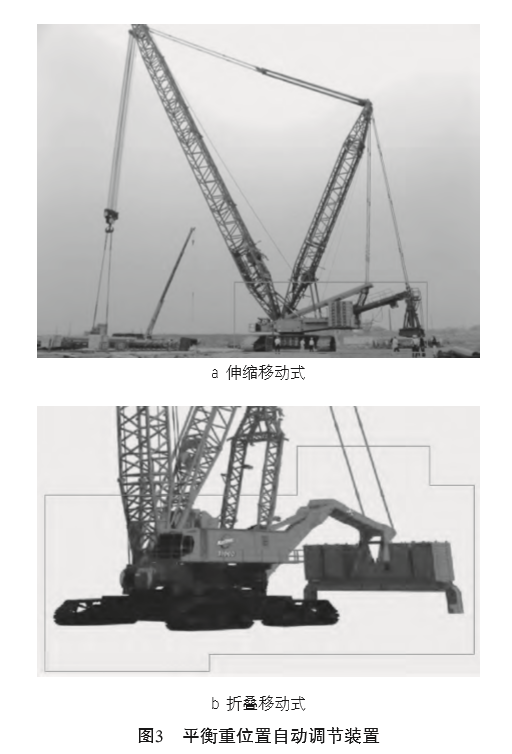
(3)吊装自动定位技术。 吊装自动定位技术是一种虚拟墙技术,可以 通过记忆上一次的吊装位置,或者通过设定回转角 度和变幅半径,利用控制器对回转和变幅动作进行 自动控制,到达设定位置时自动停止。 (4)平衡重位置自动调节技术。 对于平衡重位置可变的履带起重机,通过检 测负载力矩和构件受力,通过计算控制,可实现根 据负载力矩自动调节平衡重距离回转中心的位置, 以使整机的力矩平衡一直处于良好的状态,从而改 善结构件的受力状态。平衡重位置自动调节装置结 构如图3和图4所示。 3.2 安全智能控制技术 安全智能控制主要体现在位置控制和受力控 制等方面。 (1)位置控制技术。 位置控制主要包括臂架角度限位、油缸行程
限位、钢丝绳出绳长度控制、吊钩位置限位等,主 要是保护结构免被撞击损坏以及臂架系统防后倾 等,一般通过限位开关检测位置,实现自动保护。 钢丝绳出绳长度则通过检测并控制卷扬出绳量,保 证多卷扬起升同一个吊钩时的同步性。 (2)受力控制技术。 受力控制主要包括起重机防过载控制、油缸 压力自动控制等。 起重机防过载控制主要通过力矩限制器实 现,力矩限制器检测起重机的负荷情况和关键构件 的受力情况,当起重机出现可能会给机器或人身安 全造成危害的过载或倾翻时,会给操作者发出警 报,并自动限制起重机危险方向的操作。力矩限制 器同时能记录起重机工作时的各种参数,为故障诊 断和问题分析提供依据。 臂架的液压防后倾系统可根据负载情况自动 调节防后倾油缸的压力,在重载时减小臂架系统的受力,达到保护臂架系统的作用。
节能智能控制技术 节能智能控制技术主要体现在发动机节能控 制、液压系统节能控制等。
(1)发动机节能技术。 发动机节能技术包括发动机散热智能控制、 发动机启停技术等。 发动机水散及中冷器设计成独立智能控制系 统,可以根据不同环境分别进行不同强度的散热控 制,降低发动机功率损失,达到节能效果。 沃尔沃为其工业发动机推出了一项新的启动/ 停止功能,该功能在长时间空转期间关闭发动机, 当操作手按下油门或拉动驾驶室内的拉杆时,则会 重新启动。这项功能能带来诸多好处,比如降低油 耗、减小噪声和排放等,目前在公路车辆中应用越 来越多,但是在工业发动机上还很少。该功能大约 能节省5%~15%的燃油成本,取决于操作手在工 况中的空转次数(空转越多,节省的燃油越多)。 在履带起重机上应用发动机启/停技术,须确保在 起重机作业安全的前提下,并可选择启用或关闭此 功能。
(2)液压系统节能技术。 液压系统节能技术包括液压系统散热智能控 制、极限功率控制技术等。 液压系统智能控制系统可以通过检测液压油 温度,进行不同强度的散热控制,降低液压系统功 率损失,实现节能控制。 极限功率控制主要是控制液压系统功率接近 发动机功率但又不超过发动机功率,不致造成发动 机过载,并能发挥发动机能力,实现系统节能。
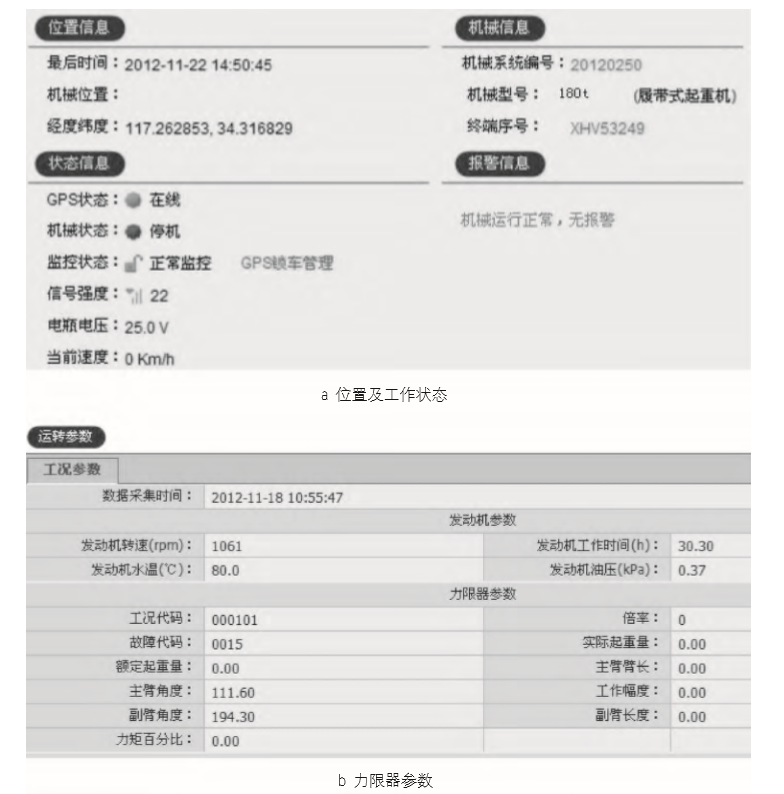
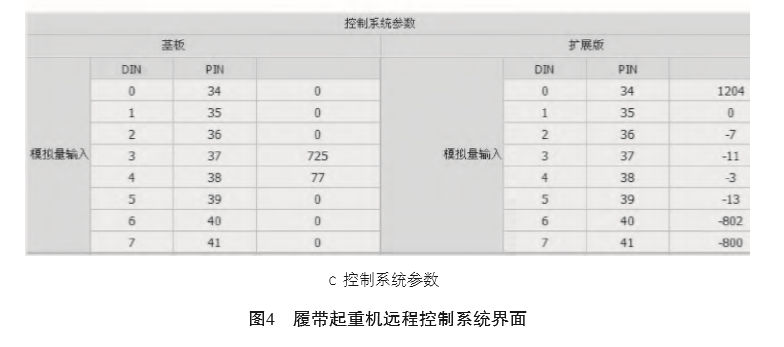
远程监控技术 履带起重机远程监控系统主要实现以下功 能:力限器参数监控(实际起重量、工作幅度、工 作角度、力矩百分比等)、发动机参数监控(转 速、水温、机油压力、燃油等)、远程控制和远程 服务功能。其工作原理如图1所示。 履带起重机远程监控系统由车载控制系统、 GPS/GPRS装置和远程监控中心3部分构成。远程 监控中心满足管理者要求,可根据用户需求随时监 视其下属的前端控制系统的运转状态,分析和诊断故障发生情况,并向前端的操作者发出调度指令, 或提供设备维修、调整措施的建议。车载控制系统 满足操作者要求,实时监视起重机的运转状态,异 常情况下向操作者发出报警指示,并接收远程监控 中心(管理者)发出的调度指令或建议。远程监控界面主要采用Web Access技术开发,当用户通过 IE浏览器输入Web服务器的IP地址时,可进入远程 监控系统界面,查询履带起重机的地理位置、工作 状态和关键参数等,如图4所示。
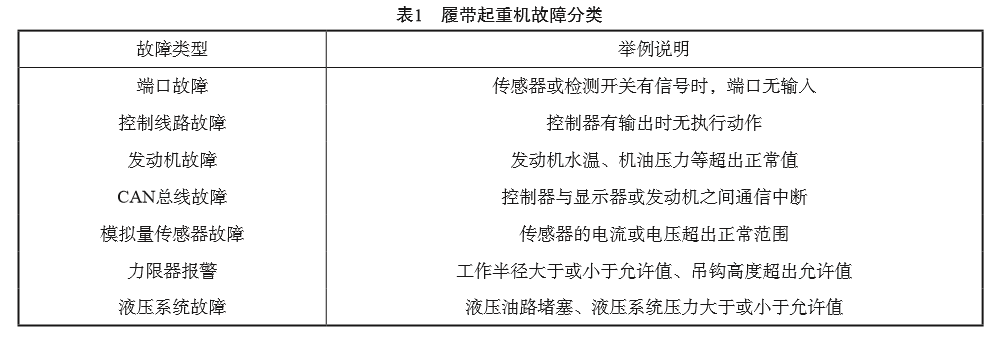
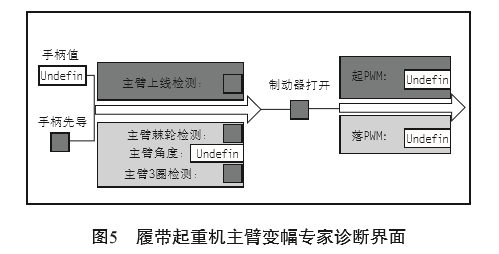
故障智能诊断技术 履带起重机的故障诊断系统主要由数据预处理程序、参数数据库、现场专家等组成。首先 对从安全监控端传感器上采集的信号进行预处理, 然后送入参数数据库,与故障数据库中的信息进行 匹配,由专家算法进一步分析故障部位和故障原 因,待确认后将信息传递给操作人员。 履带起重机的故障主要分为6类,见表1。操作人员或维修人员可以通过显示器上故障代码显示 及查询界面、端口状态查询界面、专家诊断界面和 传感器诊断界面等监控起重机的工作状态,在专家 系统的帮助下查找和解决起重机的故障。例如主臂变幅无下落的动作,根据主臂变幅专家诊断界面 (如图5所示),变幅手柄的输入值会在界面上显 示。手柄先导、主臂3圈检测(主臂变幅卷筒上的 钢丝绳不能少于3圈)、主臂棘轮检测和卷扬制动 器有信号时,方框会由红色变成绿色。当手柄输入 值大于死区值(一般为100),手柄先导、棘轮检 测(主臂变幅卷扬动作时棘轮需打开)有输入,并 且3圈检测无输入信号时,变幅泵和变幅卷扬制动 器会有输出,变幅下落才有动作。操作者或维修人 员可以通过界面判断哪个条件不满足,进一步确定 故障点,以便排除故障。
随着履带起重机的应用越来越普及,同时工 程工期不断缩短,对于履带起重机的安全性、可靠 性和节能要求越来越高,维修时间越来越短,智能 化控制是履带起重机的一个重要发展方向。国内履 带起重机智能化控制尚处于发展初级阶段,需加大 履带起重机智能化控制的研究,提高履带起重机的智能化程度,以适应工程需求。同时,履带起重机 智能化控制研究,对于其它工程机械也具有一定的 借鉴意义。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
