专注起重机安全监控管理系统为工业安全行业保驾护航!


塔式起重机(简称塔机)大规模应用于各种工程建设中,极易引发重大安全事故。近年来,国内建筑起重机设备事故频发,且呈逐年上升趋势。为提高工作效率,在同一施工现场经常需要布置多台塔机集群近距离交叉作业,这样大大增加了塔机群间碰撞的危险,导致重大安全事故的发生。国标 GB/T5031-2008规定:起重机械必须强制安装安全监控装置,须对塔机的工作状态、额定能力及碰撞危险 因素进行监控与记录。因此,开发低成本、稳定高效的塔机无线动态防碰撞系统对于塔机应用安全领域具有重要意义。 本系统采用多传感器融合技术及ZigBee无线通信组网技术对周边塔机进行精确位置定位、运动轨迹预测,通过动态防碰撞算法获得塔机的潜在碰撞预报警及控制信息,有效防止塔机间碰撞事故的发生。ZigBee技术作为一种短距离无线通信,具有低功耗、低成本及高度智能化等特点,是 一组基于IEEE 802.15.4无线标准的组网通信技术,具有十分广阔的应用前景,已经成为国内外公认的新兴前沿热点研究领域。
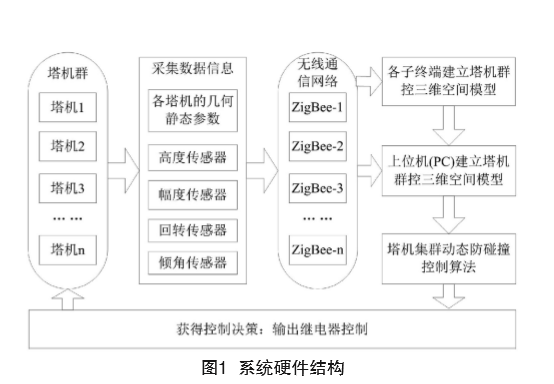
系统的整体结构与功能 塔机群无线安全防碰撞系统主要由各塔机监控终端、 ZigBee无线传输网络、上位机监控终端组成,整体结构如图 1所示。 各塔机监控终端为安装在塔机驾驶室内的嵌入式监 控仪表,是安全监控前端的基础硬件平台,主要负责采集 本塔机传感器网络数据实现实时本地监控,并通过连接的 ZigBee无线模块形成一个网络节点,是构成整个无线网络的基础。ZigBee无线传输网络采用分布式控制模式,即每个监控终端节点都是一个独立的子系统,通过相应算法能独立判 断周围危险障碍物并作出相应控制。上位机终端为主控制中心,主要负责管理整个无线网络子系统,实现了系统的双重 保障。
系统硬件平台由Cortex-A8微处理器、传感器采集网络、 报警与控制电路、触摸屏显示器、GPRS/GPS模块、ZigBee 无线通信模块等部分组成,系统的整体框架如图2所示。
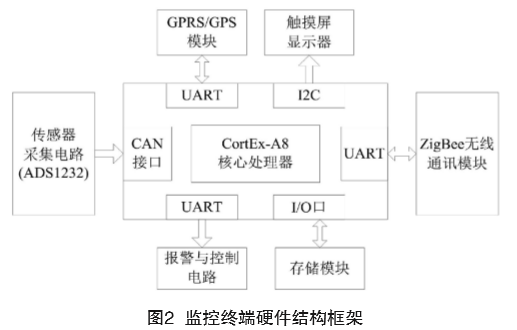
系统采用低功耗、高性能的工业级Cortex-A8微处理器为控制核心,标准工作主频为 600 MHz,采用10级NEON媒体流水线10-stage NEON media pipe-line,并有先进的分支 预测技术,并且用的 NEON整型和浮点型管线进行媒体和信号处理。ZigBee模块采用2.4 GHZM2410,内嵌透明传输(点对点和点对多点)通信协议,采用RS485接口,最高无线通信速度可达1 Mbps,非常适用于嵌入式系统环境。
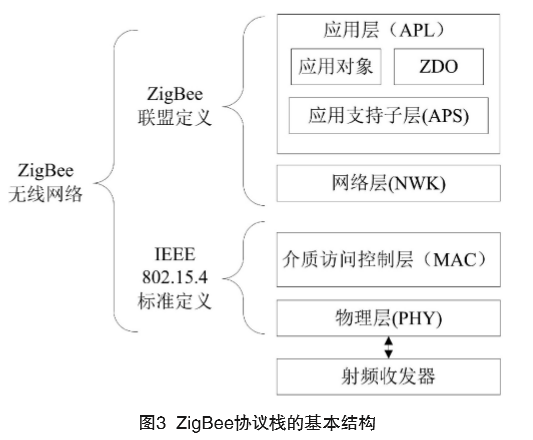
基于Linux4.2内核系统的ZigBee智能组网 系统防碰撞组网无线网络采用TI最新的Z-StackCC2530-2.2.2版本的协议栈,在其基础上对3类网络节点功 能进行软件开发,ZigBee协议栈的基本结构如图3所示。
ZigBee协议栈分ZigBee联盟定义IEEE802.15.4 标准定义两部分。ZigBee联盟定义应用层和网络安全层。如图 3所示,应用层主要用于对应用框架模型进行开发应用,网络安全层则负责数据管理、组网连接和网络安全等; IEEE802.15.4是IEEE确定的低速率无线局域网标准,该标准定义了介质访问控制层(MAC)和物理层(PHY);介质访问 控制层主要负责产生同步信号和网络信号,并处理物理无线信道访问请求。物理层主要负责物理层数据服务和管理服务,并定义了物理无线信道和介质访问控制层之间的接口。
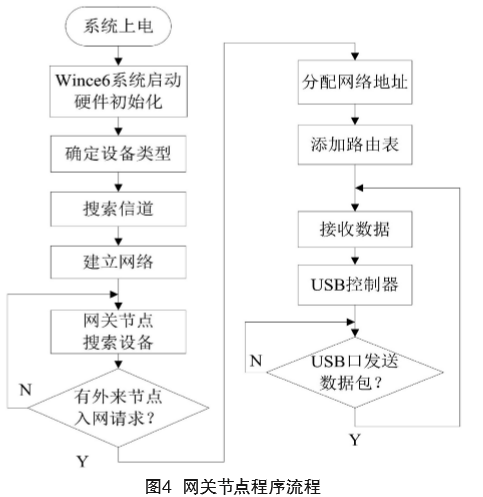
网络的第一个设备是网关节点,主要负责网络的建立。 系统上电初始化后启动Zstack协议栈,根据 Config.cfg的频率设置搜索信道;在确定信道可用后通过网关节点配置网络 参数建立网络连接。网络连接建立后网关节点开始不停地对一定范围之内的区域搜索查看是否有节点加入请求,如果收到外来节点的加入请求,本网关节点就会响应加入并自动分配新节点网络地址,并更新本地路由表信息。在建立网关和节点的通信后就可以实现相互无线通信,接收的数据通过控制器标准SPI接口从内部寄存器直接传送给USB控制器。网关节点的程序流程如图4所示。
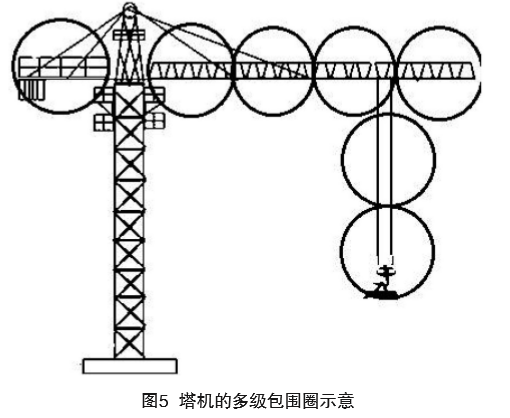
塔机群建模与动态防碰撞算法设计 塔机群防碰撞涉及多个静态和运动对象之间在三维空间中相交计算方法,具有复杂的时间和空间关系。本系统拟采用层次空间包围体相交检测算法,根据塔机的空间对象关系划分为3层包围体形式,本算法一方面采用包围体形式 代替了复杂的塔机部件几何形状,减少了计算复杂度,同时采用层次方法是利用空间对象关系优化检测算法,进一步降低检测计算开销提高计算效率,另一方面,采用层次包围体方法在空间上包含了所有塔机部件,在检测效果上具有很高的可靠性和实用性。本项目防碰撞算法的核心思想是: 先利用最外层包围体的相交检测排除不可能发生相碰的塔机,再利用子包围体和相交检测排除不可能发生碰撞的塔机部件,最后利用基于求异面线段距离的碰撞检测算法进行精确检测,最终得出结果。
采用包围体的目的是利用体积略大规则的几何体形状代替复杂的几何对象进行相交计算,降低了计算复杂度和提高运行效率。在空间对象碰撞检测领域,空间对象的包围体有多种形式,主要包括沿坐标轴包围体(AABB)、球包围体 (Spheres)、方向性包围体( OBB)等。根据塔机的具体空间形状与运动关系,在本算法中我们选择球包围体方法,其特点是几何体构造和相交测试简单,同时当物体发生旋转运动时,包围体不需要做任何更新,符合塔机运动情况。本算法所采用的多级包围体形式如图5所示
基于Linux4.2内核嵌入式操作系统的基础上,结合MFC软件编程构建友好的人机界面,实现了对影响塔机安全数据的实时监控与记录,并构建了实时安全防碰撞网络。通过现场测试表明,去除极值的情况下,系统滤波系数小于等于8 时,回转监控数据会出现偶尔跳跃,容易导致控制电路误动作,综合考虑,本系统滤波系数选取16和32两种,供客户设置,系统数据稳定可靠,可稳定满足现场工况需求。
本文针对在同一施工场地多台塔机近距离交叉作业及基于Linux4.2内核嵌入式操作系统的基础上,结合MFC 软件编程构建友好的人机界面,实现了对影响塔机安全数据的实时监控与记录,并构建了实时安全防碰撞网络。通过 现场测试表明,去除极值的情况下,系统滤波系数小于等于8 时,回转监控数据会出现偶尔跳跃,容易导致控制电路误动 作,综合考虑,本系统滤波系数选取 16和32两种,供客户设置,系统数据稳定可靠,可稳定满足现场工况需求。
本文针对在同一施工场地多台塔机近距离交叉作业及可能发生碰撞,设计开发了基于 Linux4.2内核及ZigBee技术的塔机安全监控与防碰撞系统。针对目前国内大部分类似产品实时性差、精度低、缺乏塔机群动态防碰撞功能等问题,系统采用工业级 Cortex-A8为硬件核心,开发了基于 Linux4.2内核下ZigBee技术无线网络,采用多级包围圈防 碰撞算法实现了对塔机群的相互动态防碰撞预报警及安 全控制,通过现场调试,系统稳定可靠,确保塔机安全运行的同时,有效地提高了塔机群的作业效率,具有良好的市场前景


158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
