专注起重机安全监控管理系统为工业安全行业保驾护航!


随着国民经济建设的深入,建筑业的不断发展以及建筑主体高度的不断攀升,塔式起重机作为高层建筑施工的主动随着国民经济建设的深入,建筑业的不断发展以及建筑主体高度的不断攀升,塔式起重机作为高层建筑施工的主动脉得到了越来越广泛的应用[1]。同时其全问题日益增多,问题的种类日益多样化,问题的难度和复杂度也在不断急剧增加。塔机的安全问题是不容忽视的,而实现对塔机工况参数的 实时采集、监控、预警是解决这些安全问题的关键所在,此外随着嵌入式技术的发展及其在智能监测中的应用,设计一款具有上述功能的基于嵌入式技术的塔机安全监控是非常必要的。
为了满足用户对控制系统各方面的需求,使塔机运行更安全、更平稳、更有效,世界各国都开始致力于以微型计算机 为核心的塔机安全监控系统的研制。在国内目前主要存的 问题是系统价格昂贵、功能单一、可靠性差,人机交互性差。本设计将嵌入式微控制器和嵌入式操作系统应用在塔吊安全监控装置中,使系统在功能性、实时性、可靠性、扩展性等方面得 到了提高。
系统总体方案的设计
本系统的设计根据实际需求,依据数字化、多功能、简约 化、低成本和高可靠性的计思路,结合国内建筑机械安全监控技术发展现状和未来系统功能扩展的需求,在查阅大量国
内外相关文献资料后,设计引入了嵌入式技术和 TFT-LCD 显 示技术,将 ARM 与嵌入式 Linux 相结合,确定了相应的硬件 及软件平台。 为了详细、准确地反映塔机的实时工作态,同时为塔机驾驶员提供良好的塔机运行参数信息,在塔机运行时需要监测的关键参数如下:提升高度、小车幅度、回转角度、起吊重量 及风速。塔机安全监控装置的总体设计框图如图 1 所示,
首先这些信息需要通过相应的传感器进行检测,本系统采用的起吊重量传感器为销轴式传感器,提升高度、小车幅度、回转角 度传感器为 DXZ 系列多功能行程限位器,风速感器为三杯 式风速传感器,这些传感器输出信号传输给监控仪表主机。本 仪表是一个能够运行操作系统的软硬件综合体。硬件部分主 要包括:中央处理单元、存储单元以及外围电路等。软件部分 主要包括:Linux 嵌入式操作系统、设备驱动程序以及基于 MiniGUI 的图形用户界面应用程序等。仪表对信息进行采集、 处理、存储,并将塔机实时的状态参数显示在液晶屏上,此外 做出相应的控制决策,声光的预警及控制量的输出等.
系统硬件电路部分的设计主要包括传感器单元和监控仪表单元。 3. 1 传感器单元起吊重量传感器采用销轴式传感器,轴销传感器实际上就是一根承受剪力作用的空心截面圆轴,双剪型电阻应变计粘贴在中心孔内凹槽中心的位置上,在外力的作用下产生弹性形变,电阻应变片随同产生变形阻值也将发生变化,之后采用惠斯登电桥作为检测电路,把这一电阻变化转换为电信号,从而完成外力变换为电信号输出[4]。由于检测电路输出的信号均为毫伏级电压信号,为了提高信号的传输距离和抗干扰性,在其后接一个变送器,将毫伏电压转换为标准的 0V~5V 电 压信号。 提升高度、小车幅度、回转角度传感器采用 DXZ 系列多 能行程限位器。通常为了起到安全限位的作用,在塔吊的提 升、变幅、回转机构中都装有 DXZ 系列行程限位器。限位器和卷筒轴相联,通过计算吊钩最大高度和最小高度时卷筒卷绕的圈数,调整限位器凸轮机构,进而达到限位的目标。将一精密电位计安装在现有的电气限位器中,其内部为一个滑动变阻器,在其两端加恒定的电压,中间的滑动触头的输出电压就与其移动成一个线性的比例关系,从而起到对高度、幅度、角 度测量的作用。风速传感器采用三杯式风速传感器,其感应元件是三杯风组件,由三个风杯和杯架组成。转换器为多齿转和狭缝光 耦。当风杯受水平风力作用而旋转时,通过活轴转杯在狭缝光 耦中的转动,传感器输出为 0V~5V 电压信号。
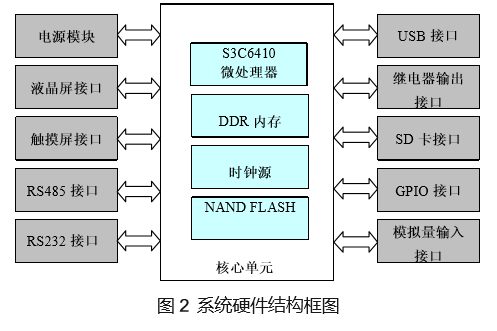
监控仪表单元 监控仪表系统硬件设计主要包括了中央处理单元模块、 电源模块、AD 采集模块、TFT 液晶屏和触摸屏模块、存储模 块、继电器输出模块、音频输出模块及 RS232 和 RS485 总 线、USB、SD 卡等外部接口模块等。系统硬件构成如图 2 所示。 监控仪表采用三星公司的 S3C6410 处理器为核心,这是 一款基于 ARM11 内核(ARM1176JZF-S)低功耗、高性价比的 RSIC 处理器,广泛应用于通用处理和移动领域,其具有 667MHz 的主频和丰富的硬件外设资源。在设计过程中,监控仪表的硬件平台采用核心板和底层板相分离的结构设计模式,核心板为 ARM 最小系统板包含了 nandflash、norflash 和sdram 等部分电路,底层板包含了 AD 采集电路,继电器控制 量输出电路及 RS232 和 RS485 等外围接口电路。
软件的设计作为整个系统的核心,向下联系着各个硬件系统的功能,也是整个塔机安全监控信息处理的中心,主要涉及以下几部分工作: 4. 1 Li nux 内核的裁剪与定制 本系统使用的是 2.6.28.6 版本的 Linux 内核。在内核的移 植中,主要是修改顶层目录下的 Makefile 文件,将 ARCH 改 为 arm,交叉编译器 CROSS_COMPILE 改为 arm-linux-;之后对内核进行配置裁剪,在内核的配置过程中,根据塔机安全监控仪表系统的具体需求,裁剪掉了一些系统中用不到的 Linux 内核自带的驱动程序,同时在内核中添加了定制好 A/D转换 设备驱动、GPIO 驱动、液晶屏和触摸屏驱动,以及对内核自带 的 USB、RS232、SD 卡等设备驱动进行设置。 4. 2 根文件系统的制作 嵌入式 Linux 支持多种文件系统,常见的文件系统有 Ramdisk、CRAMFS、JFFS2、YAFFS 等 。 本系统中使用的 Nandflash 为 2G,DDR 内存为 256M,同时系统需要写入文件, 且需要具有掉电可靠性。根据这些系统的实际需求和文件系 统的自身特点,选择 YAFFS2 作为根文件系统。首先在内核中 添加了对 yaffs 的支持,接着编译并安装了 busybox,然后构建 了文件系统,最后将构建好的文件系统制作成了 yaffs 文件系 统格式的镜像。 4. 3 应用程序的设计
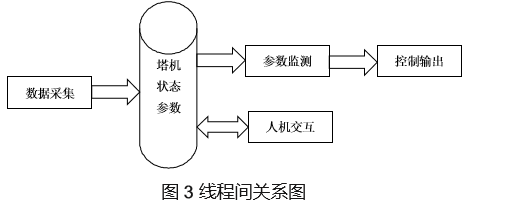
本系统应用程序的编写过程中为了提高软件的运行效率,采用了多线程设计思想,进行了基于 MiniGUI 图形用户界 面的设计。根据系统功能及操作主体的不同,软件具有两种功能模式,分别是管理模式和工作模式。管理模式下主要进行系统参数的设置和历史参数的查询,包括塔式起重机自身参数信息(外型尺寸、起重特性曲线表等)的设置,传感器的标定等。工作模式为参数设定后正常的工作模式,包括:实时数据的采集、处理、显示、输出等。在系统工作模式下软件采用两个线 程,包括一个主线程和两个子线程。其中主线程主要用于人机 交互,主要实现图形化的显示、界面的切换等;子线程 1 主要 接收 AD 采集到塔机运行状态参数,并填充到相应的数据结 构体中,该线程每 100ms 刷新一下数据结构体;子线程 2 主要 负责参数监测和控制量的输出。三者之间以塔式起重机运行状态参数为核心,并且通过线程的同步机制保证数据结构体中数据的安全、准确。三者之间关系如图 3 所示。
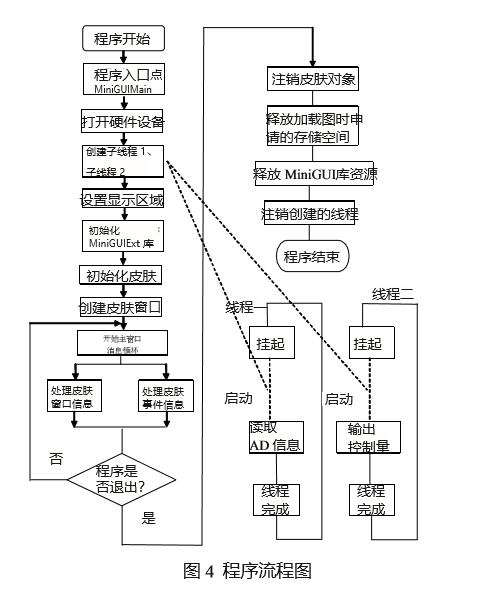
主线程的主要任务是接收和处理窗口收到的各种消息,其中包括:皮肤窗口消息和皮肤事件消息。在本程序中,皮肤 事件消息主要包括点击皮肤按钮时产生的消息。例如点击传感器标定按钮,系统将把该皮肤事件发送到事件回调函数中,在该函数中实现对当前界面皮肤对象的注销以及传感器界面新窗口的创建等,从而达到界面切换的目的。皮肤窗口消息主 要包括 MSG_CREATE、MSG_PAINT 和 MSG_TIMER 等 [6]。 在皮肤窗口消息回调函数中实现的主要功能是子线程 1、子线 程 2 数据的接收和显示界面的实时刷新。具体程序流程如图 4 所示。
本文针对日益增多的塔机安全问题,将 ARM 与嵌入式 Linux 软件编程相结合提出的塔机安全监控装置设计方案,通过现场试验表明该装置不仅能够显示塔机的实时运行状态参
数,同时能够对存在的安全隐患做到提前的预警并对相应回路进行控制,该装置具有性能定,实时性强,误差小,扩展性好的特点



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
