专注起重机安全监控管理系统为工业安全行业保驾护航!


塔式起重机是智慧工地中必不可少的关键设备。 随着我国塔机产量和保有量的不断增长,各种安全事故也日益增多。由于塔机是一种需要在施工现场安装和拆卸的施工机械,工地转移频繁,整个使用流程中存在较多薄弱的、事故多发环节。根据事故数据统计显示,塔机使用环节普遍存在的超载和违章作业等现象,是导致塔机事故的直接原因。 在工地塔吊应用中,单个塔吊的应用场景几乎不存在,而多塔的布置需要根据所要建设的建筑物来确定,那么,实际中往往各塔机之间存在一定的碰撞关系。 塔吊属于特种设备,塔吊司机作业为高空作业,一旦发生塔吊碰撞,会极大危害工地生产安全。本文重点介绍群塔物联网关自组网以及群塔防碰撞功能设计,所述的系统设计可解决塔间通信和群塔防碰撞漏报误报警的问题。
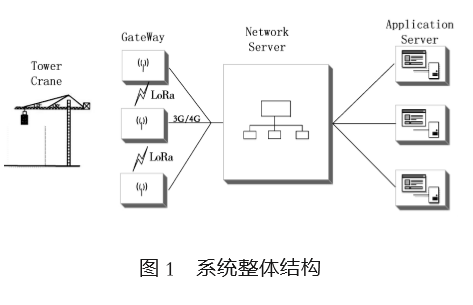
整体设计 系统整体结构如图1 所示。塔机上安装物联网关设备,物联网关设备之间采用LoRa 连接,并与各相关塔的网关自组网,形成防碰撞预警系统。 网关与NS服务器采用 3G/4G 连接,将塔机监控数据发送到后台服务器,最后由 AS 服务器完成监控数据的展示等。
网关组网 市面上的塔机监控系统,塔间通信通常采用传统的基于FSK 制式的ZigBee 技术来实现。 在长期使用过程中发现,FSK在工地应用中存在干扰、传输距离不稳定/过短等问题,造成各塔机之间的实时数据交互存在不稳定性,以致发生漏报警。 本文所设计系统采用基于LoRa 制式的无线传输技术组网。 LoRa 是美国 Semtech公司采用和推广的一种基于扩频技术的超远距离无线传输方案,这种传输方案改变了以往关于传输距离与功耗的 折衷考虑方式, 提供一种简单的能实现远距离、长电池寿命、大容量的系统,进而扩展传感网络。
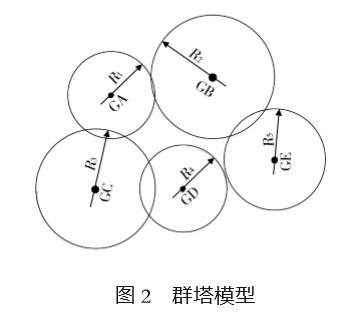
组网方式 工地群塔模型如图2 所示。 5 台塔机形成一个防碰撞系统模型,彼此之间在大臂旋转或者小车运动过程中,存在碰撞关系。 每台塔机上的监控网关将自身的塔机实时数据通过LoRa不断广播到其他网关,同时实时接收其他网关的实时数据。 因塔机之间的数据交互要求实时性高,因此各网关之间采用广播方式为主、主动请求为辅的方式进行数据交互。当本塔网关连续接收到相关塔的数据时,本塔网关不主动请求数据。 当本塔网关超时未接收到某相关塔的数据时,将主动发送获取数据请求帧。 实时数据主要包括:塔机的设备编码、幅度、高度、回转角度值。每台塔机以自身作为“中心塔”,也称为“本塔”,其他存在碰撞关系的塔机称为“相关塔”。 如图 2 中所示,当塔机GA作为本塔时,它的相关塔机为GB和GC。 那么GA在接收数据时,根据设备ID来剔除GD和GE 塔机的数据。
LoRa参数确定 LoRa通信采用扩频技术实现超远距离通信, 其扩频因子为6~12, 空旷情况下最远通信距离可以达到 5km 以上。 在本文所述的工地应用中,以某一台塔机和其相关塔组成的群塔网络,直径应该在300m范围内,如果通信距离太远,势必会造成碰撞 概率增大,从而对周围其他非相关塔机的数据造成干扰。 而通信距离如果太近,又会导致数据帧丢失过多。 因此,结合实际使用,LoRa 的扩频因子默认为8,系统可以远程/本地调节的方式,来实现该应用中的距离要求。
防碰撞算法设计 群塔防碰撞,即塔机数量为2台及2台以上时,存在重叠的作业区域,使得塔机间发生碰撞的可能。 在符合布塔规范的情况下,只存在高塔机的吊钩碰低塔机的大臂或平衡臂的问题。如图 3 所示 为塔间碰撞示意。

实际情况下, 往往存在布塔不规范等问题,导致更多的碰撞情况,如大臂碰塔身、大臂碰大臂等。
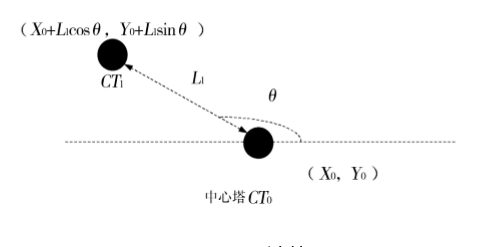
坐标计算 每台塔吊以自身为本塔,其他塔吊作为相关塔。 防碰撞关系的确定,首先要计算出各相关塔吊相对于本塔的相对坐标。本塔坐标均采用默认值如 200,200),利用极坐标计算方法,通过回转角度值和各相关塔到本塔的实际距离,自动计算各相关塔的相对坐标。 如图 4 所示,本塔坐标为CT0(X0,Y0),本塔和相关塔之间的距离为L1,本塔大臂指向相关塔时的回转角度为θ,则相关塔机坐标为CT1(X0+L1cosθ, Y0+L1sinθ)
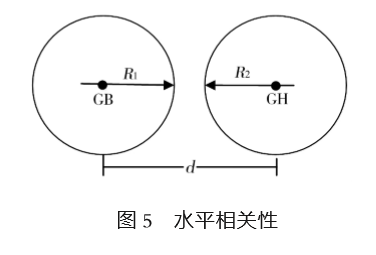
水平相关性 水平相关性是指两塔在水平面上是否存在碰撞关系,如图5 所示。 只有当两个塔机中心点的距离d<R1+R2)时, 两台塔机才具备水平相关性。 其中 R1、R2 分别为两台塔机的大臂长度,即旋转半径。
高度相关性 只有当塔机之间存在水平相关性时,才考虑高度相关性。 高度相关性是指,塔机之间存在空间上的高度差异,存在碰撞区域
本塔根据与相关塔塔身的高度差来确定碰撞类型。 当本塔塔身高度大于相关塔塔顶高度时,则本塔是高塔机;如果本塔塔顶高度小于相关塔塔身高度,则本塔是低塔机;除此之外,为等高塔机。 建立模型需确定三点坐标:前点、后点和吊钩坐标点。 前点即大臂最前端位置;后点即塔吊平衡臂最尾端点,吊钩坐标点为当前吊钩的位置点。 如图 6中高度相关性示意图定义,本塔的前点My_move_A,后点 My_move_B,吊钩点My_move,相关塔的前点His_move_A,后点His_moveB,吊钩点His_move。
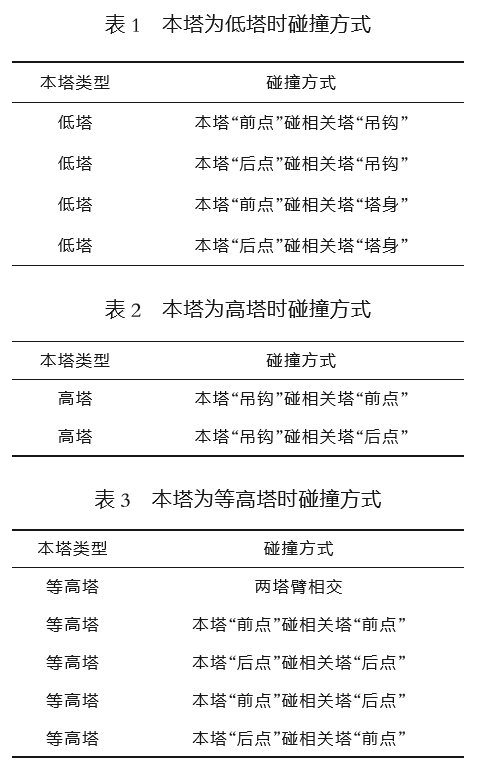
防碰撞计算 在群塔相互运动中,需要实时计算上述三点位的相对位置来计算碰撞关系, 需从 “碰撞距离”和 “碰撞角度”两个方面去计算。 如表1、表 2、表 3 所示,分别是本塔为低塔、高塔和等高塔时的碰撞方式。
首先根据塔吊静态参数和实时状态数据,确定本塔相对于相关塔的类型。然后分别计算出各碰点的坐标,得出对应的碰撞角度和距离。以“本塔为低塔时,本塔大臂(前点)碰相关塔吊钩”为例:
(1)实时计算本塔中心坐标点到相关塔吊钩坐标点的距离 d1,当“d1<本塔大臂长+预警距离”时,吊钩进入本塔大臂的碰撞范围;然后分别计算角度预警和距离预警;
(2)根据相关塔吊钩坐标点相对于本塔的角度 Pangle; 当 Pangle-本塔实时角度<角度预警值时,触发预警;
(3)实时计算相关塔吊钩到本塔大臂的距离,当距离到达预警/报警范围后,发生预警/报警。
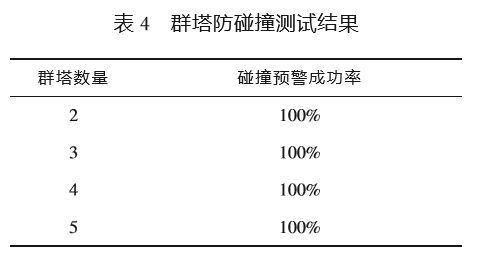
4 系统实际使用效果 表4 所示是应用本算法的塔机监控系统在全国超过 50 个工地的应用统计结果。
本文所设计的塔机物联安全防碰撞系统,其应用在具体监控系统中时,整体系统的性能还取决于回转传感器以及幅度、高度传感器的精度,这些数据的采集在此不作讨论。
结语:本文针对现有市场上塔吊监控产品中群塔防碰撞性能的不足,设计了基于LoRa 传输技术的自组网防碰撞系统。文中所设计的防碰撞算法已广泛应用于全国多个智慧工地的塔机安全监控系统中,性能稳定可靠,为工地塔机安全作业提


158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
