专注起重机安全监控管理系统为工业安全行业保驾护航!


本文主要围绕结构健康监测和预警系统展开设计与实现,研究的主要内容包括:门机结构的不安全因素分析,门机安全监测预警系统总体方案设计,门机有限元模型的建立与分析和各类传感器布点预警工艺的研究,监测平台软件系统的开发与整体实现和测试结果的分析。本文结构简单流程如图 1.7 所示,论文的基本结构安排如下:

第一部分:主要由监测系统的背景意义出发,结合结构健康监测以及监测系统平台的国内外研究现状,引出本文想要研究与解决的问题,最后简单的介绍论文的结构安排。
第二部分:通过调研、了解门机经常使用较多的一大些大型货运港口码头,以及研究MQ2533 型门座式起重机的《使用说明手册》、《装卸机械履历册》和《单臂架门座式起重机技术规格书》,简单介绍门机的结构与其工作原理,对门机主要结构件的一些不安全因素进行分析为后续系统总体方案的设计奠定基础。
第三部分:提出港口门机安全监控预警系统的具体功能设计,整体分为现场监控系统与远程监控系统,随后对系统的硬件进行选型,分析并加入滤波算法保证系统的整体系统的精度与可靠性,最后提出系统的总体方案。
第四部分:针对传感器布点预警的工艺研究,对门机MQ2533 的建模仿真分析与计算,找出应力与位移集中点进行布置传感器,并且通过研究计算得出风速风向传感的具体布点位置,并对应力、位移、风速的阈值进行分别的分析与设定。
第五部分:针对门机的安全监控预警系统实现,开发软件监控系统平台。简单介绍软件的开发环境,设计系统软件架构和软件的相应界面,并对系统硬件进行测试。最后对系统进行实际的现场安装测试应用与结果分析,并提出可以采取的一些有效措施。
第二部分:门机不安全因素分析及系统设计原则
门机作为大型危险特种设备,保证其正常的作业及工作人员的安全是一个非常严峻的挑战。本章主要分析门机在工程施工中一些重要结构的不安全因素,通过调研、了解使用门机较多的一些大型货运港口码头,研究 MQ2533门机的《使用说明手册》、《装卸机械履历册》和《单臂架门座式起重机技术规格书》,分析得出门机经常出现故障的位置及原因,为后续系统总体方案设计奠定基础。
2.1 门机结构及工作原理简介
2.1.1 门机结构
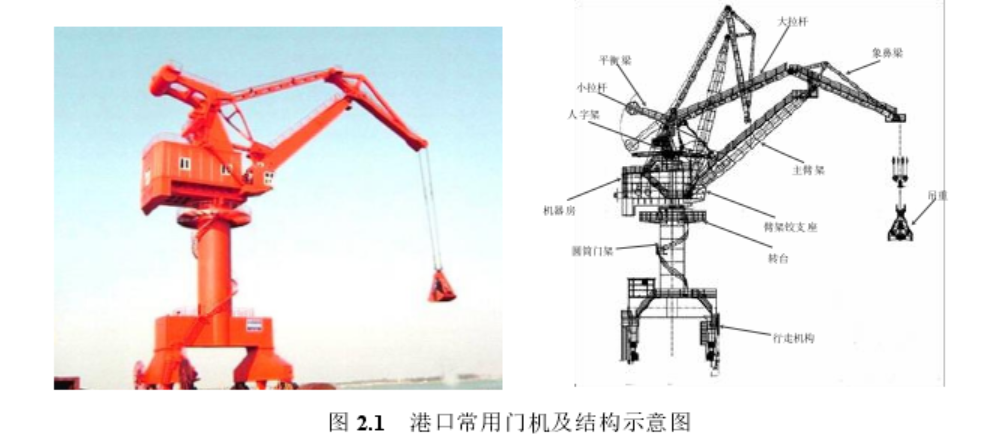
门机被广泛地应用在各种运货码头、港口及露天物料堆积场等装卸作业场所,其拥有较好的作业性能、卓越的结构设计以及良好的通用性。本文的研究对象为山东日照港口常用的门机 MQ2533,该机是四连杆式全回转起重机,本机在全幅度(9.5~33m)下,额定的起重重量为 25t。门机主要的金属构件包括门架、象鼻梁、臂架、转台、大拉杆、人字架、平衡梁、小拉杆、转柱、吊重等等,港口常用门机及结构如图 2.1 所示
门机利用的是转盘回转式支撑装置,臂架系统、平衡梁系统、人字架、机器室等安装于由滚动元件支撑着的转台上,门机有运行、回转和变幅等机构,门机多数沿地面或者其专有的轨道行走,完成装卸及起重工作,每周期内都参加作业,沿地面轨道行走时,其下方可以过铁路车辆或者其它的地面车辆
臂架:采用箱型结构,拥有充分的刚度与强度且悦目的外观。针对其主要的受力位置行了局部增强,如臂架头部、小拉杆的铰接处、滑轮补偿处和齿条箱等等部位。各个铰接点主要采用关节或者滚动轴承链接。臂架的头部装置主要由二个导向起升滑轮和挡绳器组成,其安置在臂架尾段上方,分别和变幅系统的齿条箱及小拉杆进行铰接,臂架尾段右侧部位装有幅度指示器,在作业时方便司机清晰的认识门机实时的工作幅度。
转柱及变幅平衡系统:人字架的结构主要是利用框架,且结构件都为箱形截面。人
字架的顶部设有平衡梁支座与导向起升滑轮装置,中部由变幅平台和导向起升滑轮装置构成。变幅平衡系统由小拉杆及平衡梁组成。平衡梁的结构采用的是框架,主臂梁主要为箱形截面,用销将平衡梁的头部和小拉杆进行铰性连接,尾部为配重装置,框架结构的刚性极佳,方便于制造与维修。
转台:转台结构利用的是板梁,采用圆筒结构增强于回转的支承位置,圆筒体和转台与两根板筋进行焊接。转台下部由高刚度的螺栓联接,通过回转轴承内圈和圆筒法兰盘,以便增强回转支承部位的强度与刚度。
圆筒门架:圆筒门架包括三部分为主梁、端梁和圆筒。圆筒的顶部和回转支承外圈相连通过法兰盘用高刚度螺栓联接,圆筒与主梁之间进行焊接,拥有足够的刚度和强度。为了方便后续的安装与运送,主梁和端梁间由螺栓进行联接[。门架的自身重量较小,迎风面积较小,且具有悦目的外观。
2.1.2 工作原理
门机主要分成四大机构,包括(行走机构、起升机构、变幅机构、旋转机构),行走机构为非工作机构,后三个机构均为工作机构。门机的金属结构利用有限元计算分析与计算机优化安排,为了使制作材料得到较大限度的利用,各个铰点位置布设应相当合理且结构受力部位需鲜明,并对于关键部位留有相当大的安全裕量。门机各机构与电气系统之间装有多个安全限位开关、超载保护设备等来保证门机能够安全稳定的作业。
行走机构:行走机构是非工作性机构,主要是为了调整门机作业情况下的位置,正常作业范围内,门机只进行短距离的移动,仅在预防暴风或者换泊位等异常情况下才进行相对长距离行走。运行驱动机构包括四套独立驱动装置,通过减速制动一体的减速电机,再经过开式齿轮传动副来驱动车轮,使门机能正常运行。支承装置包括安于端梁支撑面下的均衡梁、驱动从动的四组独立且有两个车轮的台车,行走的台车设置有垂直与水平铰,可以自动轻微的调整轨道直线的偏差与略微的码头塌陷,但堵塞较为惨重与轨道的严重变形都将会阻碍运行机构正常作业行走。门机两侧各设了套防爬装置、定及拉索防风装置,在暴风恶劣天气要来临时,应该把门机驾驶到锚定位置,将其锚定并且要拉紧防风拉索。行走机构非作业情况下,为了预防门机由于风载荷或者其它因素受损应该随时将防爬靴放下。
起升机构:起升机构包括双电机、双减速器、双卷筒,单电机与双电机可以互换工作,电机的起动、调速运用的是串电阻,下降运用的是能耗制动方法。在机器房内前后布置了独立卷扬装置。两套卷扬机构不仅可以单独运作,也可同时启动。抓斗工作的情况下,前部卷扬设备的钢丝绳前部连接抓斗的闭合绳,后部需要连接支持绳。原理为,变频电机带动齿轮减速器,其间经过联轴,低速轴带动卷筒,卷筒上带有钢丝绳,带动变频电机的正转和反转,控制卷筒上钢丝绳卷进与放出状态,真正实现取物与货物的升降;在切断电机供电状态下,主要利用电力液压推杆制动器进行制动,控制取物和货物升降装置停止运作。
旋转机构:回转机构主要包括回转驱动装置与回转支承装置,回转支承装置运用的是三排滚柱式方法,回转驱动装置实现转台回转主要是利用弹性柱销联轴器、行星齿轮减速器、摩擦型极限力矩联轴器来驱动小齿轮做行星运动。驾驶员可以观察回转运动真实的运动情况,脚踩回转刹车的踏板,用脚的力度来控制制动过程中的轻重缓急,需要减速时驾驶员需轻踩脚刹,重踩时旋转机构将会断电并进行制动。
变幅机构:变幅机构主要利用四连杆,补偿滑轮组主要补偿水平方向上位移的变幅,平衡系统利用杠杆的配重进行平衡。变幅机构包括减速器、制动器、电动机、齿条导向装置等等。臂架的扭动是由变幅机构的减速轴带动小齿轮,小齿轮带动前后位移齿条。在摇摆架上设有小齿轮与上下压轮,进行变幅的时候可围绕着摇摆架的中心轴线进行摆动,从而保障齿条和齿轮的更好啮合。门机作业过程中磨损等各种因素,啮合的间隙可能会出现相应的变化,为了保障门机的各个机构正常作业,需要调整齿轮与齿条的啮合间隙,可以利用变幅机构上摇摆架的偏心压轮来调整齿轮与齿条件的啮合间隙。
2.1.3 工作条件及设计指标
(1)设备工作条件:
工作环境温度为-25~+45C;最大相对湿度不大于 95%,可有盐雾、凝露;作业风速不超过 20m/s;非作业风速为(35~42)m/s,可根据用户要求确定。门机的电源为三相交流电,电压为 380V,频率为 50Hz,其电动机允许电压波动上限是额定电压的+10%,在尖峰电流时刻,波动下限是额定电压的-10%。
(2)设计指标:
1)测量精度:在门机实际作业工况下,系统的测量误差应不大于 5%;
2)工作温度:0℃~+60℃;湿度:10%~95%RH;
3)在门机作业周期内系统的采样周期应该不大于 100ms;
4)历史数据储存的时间应该不少于 30 个连续工作日。
2.2 门机不安全因素分析
2.2.1 臂架不安全因素分析
臂架是门机的主要受力部分之一,臂架是门机出现故障的概率最大的结构件,其比例占到考察研究分析故障总数的 13.6%,臂架结构的出现损伤的主要原因有:裂纹与断裂、凹凸变形松动、非正常的磨损与弯折。图 2.2 是调研时发现的臂架出现较多的故障部位。

臂架折断也是瞬时间发生的,然而在通过调研与分析发现,臂架的折断是一个相
对迟缓的过程,在折断前臂架受压一侧的翼板将会呈现出凹凸波浪状的变形。
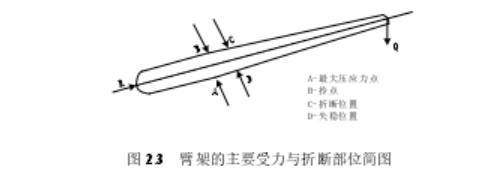
在大多数的情况中折断的位置没有发生在下翼板压应力最大处附近,而且通常不都是在载荷最大的情况下折断,而是载荷最小的时候甚至空载的时候折断。凹凸波浪状变形是局部失稳一个重要的特征,可以用一个傅里叶级数谐波来进行描述。如图 2.3 示的四边简支板,其变形函数为:bynaxmAWm=sinsin
(2.1) 屈曲时取 n=1,m1A 不等于 0, =bam / 时将出现圆形鼓包,如 ba4/ = 时即有 4 个圆形鼓包。由以上分析可以得出主臂架折断的主要原因是受压翼板失稳,然而折断起因与板自身的支承条件、材料弹性模量的下降、焊缝以及初始曲率等因素具有密切的关系。
2.2.2 象鼻梁不安全因素分析
门机属于四连杆机构,象鼻梁是整个门机结构最上与最前的结构件,其设计好坏在
整机的自身重量与作业的安全稳定方面起到至关重要作用。如果该结构设计超重将导致门机的配重也相应地放大,从而造成门机整个自身重量的提高而影响运行机构轮压。所以保证象鼻梁的可靠性、稳定性以及刚度强度的前提下,尽可能地优化该结构使其自身重量尽量减轻。象鼻梁是直接承受货物载荷的构件,其顶端靠近吊钩滑轮的焊缝处较多而且经常承受动载荷,其裂缝容易扩张,在作业过程中,构件每个平面都可能发生相应的扭转、弯曲变形,由于裂纹导致的象鼻梁上滑轮座掉下来是存在非常严重的安全隐患。
2.2.3 人字架不安全因素分析
人字架是许多机械设备中必不可少的组成部分之一,也是门机的主要部件之一,人
字架下部与转台通过焊性相连接。如图 2.4 是调研时发现的人字架出现的一些故障情况。
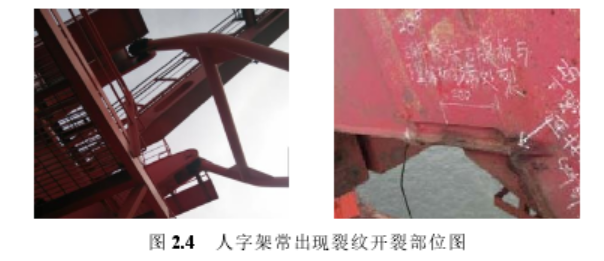
人字架是整个的上部平衡系统(臂架、回转台、绳索系统)的支点,起升钢丝绳与变幅钢丝绳需要人字架顶部的滑轮进行传力,使整个上臂架系统达到平衡。人字架的变形相对较小,变形最大的部位在人字架的顶部,最大应力发生的部位在人字架与转台连接的部位,位置为结构裂纹发生的敏感部位,通过调研与分析发现,人字架经常产生故障的类型主要为裂纹、局部的变形或松动断裂等。
2.2.4 大拉杆不安全因素分析
门机的大拉杆采用箱型结构设计,其位于整个门机较前端与象鼻梁连接,焊接时产生的收缩变形可能对该结构造成后续弯曲变形的影响,调研与研究发现大拉杆常常出现故障的原因主要有局部的变形,细小裂纹、与象鼻梁铰接处松动或者断裂。图
2.5 是走访时发现的大拉杆出现的故障情况。
2.2.5 转台不安全因素分析
门座式起重机在装卸过程中,承担着多种交替变换的载荷,如臂架、平衡系统配重和货物等等,圆筒锚定的两侧可能会出现纵向的裂纹,通过调研与分析得知,主要的问题是焊接处存在质量问题,像筒体连接两筋和旋转减速器承重箱体的焊缝处,上转台旋转的时候,其扭矩主要经过圆筒和支撑箱体相连的筋板传递给筒体。门机卷筒如图 2.6
所示,
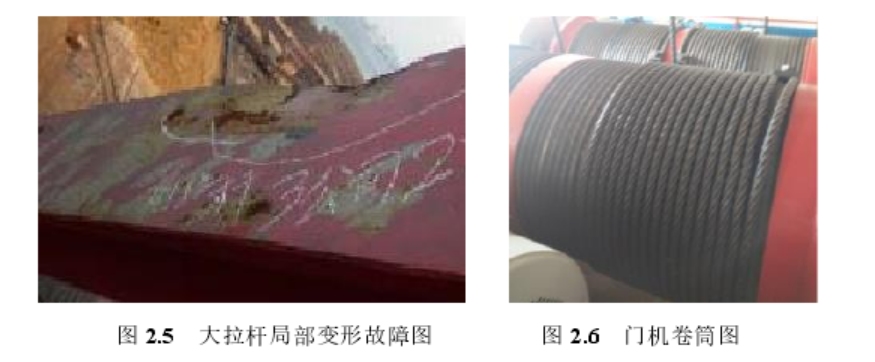
圆筒体同时承受着轴向压力与拉力且是主臂梁的两个支撑点,因为圆筒和筋板之间的焊缝质量较低,出现明显的应力集中现象因而导致锚锭装置的两侧顺着焊缝从筒体外侧往内侧出现局部裂纹,有动载荷的情况下,将会使板筋和圆筒体间的焊缝发生较为早期的疲劳损伤。
2.3 系统设计原则
门机安全监测系统是获得门机在运行过程结构信息的重要途径,使运维工作人员针对指定的目标结构做出紧急的对应措施,本文提出的系统监测设计原则如下:
1)保证系统精度与可靠性:由于门机的作业环境相对恶劣,则安装在其上的结构健康安监测系统就必须在港口等环境下实时运行监测,保证整个系统的精度与可靠性,即使多么先进的设备,在结构受损坏的前提下也发挥不出有效的作用。
2)保证系统的超前性:整体设备的选型、监测系统所要实现的功能与监控技术的发展情况、结构健康监测的相关理论相一致,应拥有先进、超前的预警性。
3)操作与维护性:整个系统在正常运行后应该易于操作与管理,为了更加方便的更新,应该对运维人员的相关技术能力要求不要太高。
4)远程固件升级功能:依据系统的自检能力与系统需要可通过远程固件来改善,并且系统应具有多种类型的通信协议与端口,为后期系统的升级来服务。
5)最佳的成本控制:提出的方案的应该利用最优控制理论,做到节约成本以及后期运维可能投入的人力、财力与物力,又能最大程度地发挥出实际情况中的监测效果。
6)系统设置:应满足门机在日常作业与管理方面的需求,应该将实用性作为第一原则,同时考虑科学实验和验证理论等等因素。
7)合理布点:监控点的布设主要依据有限元软件的分析结果和结构健康监测理论与实际结构故障等情况,应该监测门机的主要损伤结构与通常情况下维护人员无法检查
或者较为困难的检查结构。选用合适的传感器在分析得到的重点部位布点,传感器应适应设备的结构,具备长期的耐久性,在高低温作业情况下传感器仍能正常工作。选用无线传输通信将采集的数据并传送至安全监控平台系统,监控端及时地获取前端传感器采集到的数据信息;在日常作业及保养维护工作时及时发现故障及监测情况至安全监测平台。结合监测数据与现场检查数据对门机作业期间的主要结构件异常情况进行预警评估。本章通过走访、了解门机经常使用较多的一大些大型货运港口码头,以及研究MQ2533 型门座式起重机的《使用说明手册》、《装卸机械履历册》和《单臂架门座式起重机技术规格书》,简单分析了门机的结构与其工作原理,门机设备的工作条件,分析门机主要结构件的一些不安全因素的分析为第三部分监控系统的方案与第四部分的传感器布设方案奠定了基础。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
