专注起重机安全监控管理系统为工业安全行业保驾护航!


履带式起重机是一种由动臂、转台、底盘工作 机构及动力装置等组成的自行式起重机或动臂旋转 起重机,其具有可带载行走、适应性强、通过性好 及履带接地面积大等优点。通常而言,选择履带式 起重机的评定指标是起重量、起吊高度及工作半径, 三者存在互相制约的关系。在吊装作业中,控制动 作将会改变履带式起重机的运行状态,并进一步影 响到起重机整体结构的稳定性。近年来,履带式起 重机倾覆事件时有发生,比如 2015 年 7 月,山东省 某地发生一起 160t 履带式起重机倾覆事故,造成人 员伤亡。可见,重视对履带式起重机倾覆稳定性的 研究具有现实意义。下面,首先分析履带式起重机 倾覆的原因,然后再进行受力分析,并在此基础上 提出预防起重机倾覆的措施,以期保证履带式起重 机的安全作业。
起重机倾覆的原因
从工作原理的角度来看,履带式起重机倾覆的 原因主要是超载或地面不坚实。在传统设计中,履 带式起重机主要采用静态分析法,其将瞬时动载荷 看作持续静态作用。同时,国内规范普遍从静态设 计的角度出发,制定履带式起重机的动载系数。应 用表明,以上设计方法可简化整个分析计算过程, 但却无法准确地反映起重机的实际工况,且这一缺 陷在大吨位设计中尤其明显。针对履带式起重机的 后翻稳定性动载系数,如果依据国内规范进行设计, 则150t履带式起重机的轨迹不小于8m,但国际相 同吨位产品的轨迹却小于 6m。在实际作业中,如果 未准确估计起重臂的臂长或未确定起重机的载重, 都有可能因载重比额定起重量大而引起履带式起重 机倾覆。针对2015年7月发生的一起160t履带式 起重机倾覆事故,技术鉴定结果如表 1 所示。 通过分析发现,该履带式起重机倾覆事故的成 因包括直接、间接原因。其中,直接原因为路基板
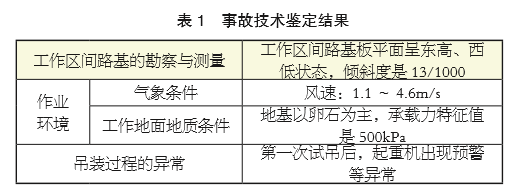
的水平度不够引起吊臂倾斜,同时在起吊时歪拉斜 吊导致侧向屈曲变形,并在回转惯性载荷的作用下 出现附加侧向载荷,如此在作业基础突发异常时, 侧向瞬时载荷将比起重机受力构件的强度设计限值 高,继而引起吊臂根部断裂,并最终导致履带式起重 机倾覆;间接原因主要包括现场作业条件差、未指定 科学的吊装方案及起重机操作人员的经验不足等。
起重机抗倾覆稳定性模型验证
履带式起重机的技术参数以起重力矩或起重量 为主。为了验证起重机抗倾覆稳定性模型是否正确, 本案以 160t 履带式起重机为例并仿真分析其技术参 数。其中,160t 履带式起重机的主臂长 18m、仰角 最大值65°、起重量额定值50t及起升速度1.05m/s。 依据 GB/T3811-2008,吊钩式臂架起重机的起升动 载系数 2 ϕ 满足下列方程式: qv2 2min 2 ϕ ϕ β = + 其中, 2min ϕ 表示对应于起升状态等级的最小起 升动载系数; 2 β 表示以起升状态等级为依据设定的 系数; q v 表示起重机在稳定时的起升速度。据此, 计算得出 2 ϕ 为 1.46。履带式起重机起升钢丝绳拉力 曲线的峰值为1.41。通过与依据 GB/T3811-2008 计算的结果值相比,差值约为 2%。因为两种计算结 果的误差值在规定范围内,表明可运用该模型来进行履带式起重机的受力分析。
起重机的受力分析
在分析履带式起重机的动态、静态稳定性时,通 过简化起重机为长方形来简化分析过程,具体如下。
静态稳定性分析 所谓静载荷,其指的是重物处在匀速起升或静止状态时的载荷。我国目前通常采取力矩法来对履带式起重机的倾覆稳定性进行静态校核。力矩法主要根据倾覆力矩总和与稳定力矩总和的关系来判断 履带式起重机是否处在稳定状态,即当倾覆力矩总 和比稳定力矩总和小时,起重机处在稳定状态,而 当倾覆力矩总和比稳定力矩总和大时,起重机处在 不稳定状态。针对力矩法中涉及的稳定力矩与倾覆 力矩,稳定力矩通常取决于起重机自重载荷,而倾覆力矩仅不与起重机自重载荷有关。在计算履带式 起重机的抗倾覆稳定性时,将相关性系数加入其中 可提高最终计算结果的准确性。履带式起重机抗倾覆力矩∑M 的计算方程式如下: 0= + + + ≥∑ G G P P i i j j M K M K M K M K M 其中, G M 表示起重机的自重; P M 表示起重机 的起升载荷; i M 表示起重机水平惯性的载荷; j M 表示起重机在风力作用下的倾覆线载荷; G K 表示起 重机自重载荷系数; P K 表示起重机起升载荷系数; iK 表示起重机水平惯性载荷系数; j K 表示起重机在 风力作用下的倾覆线载荷系数。 在无风静载条件下,履带式起重机抗倾覆力矩 ∑M 的计算方程式如下: ( ) ( ) 0 0 21 = + − − + +∑ M G b c Q R b ϕϕ 其中,Q 表示作用载荷,GB/T3811-2008 规定 Q P F Q 0.1251. = + 1.25 Q P F Q 0.1251. = + ( Q P 表示起重机在不同幅度下的 最大起升载荷;从力矩相等原理可知, b F G 1/2= ; Gb 表示起重机主臂的质量); b 表示倾覆边长度 的 1/2; c 表示回转中心距离整机重心的长度; G 表示整机质量; R 表示幅度。据此可得,履带式 起重机的稳定力矩和倾覆力矩分别为 ( ) 1G b c + ϕ 、 (1.25 0.05 )( )2 P G R b bQ − + ϕ 。 3.2 动态稳定性分析 研究发现,针对某些受时间限制明显的倾覆因 素,即使履带式起重机处在静态稳定性的失稳状态 下,其仍能维持稳定状态,其原因如下:在起重机 倾覆前,倾覆因素的作用时间不能继续发挥作用。
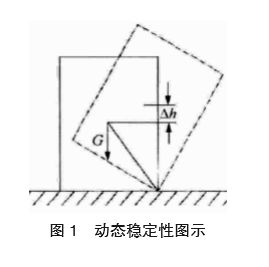
对于上述稳定性,通常称作动态稳定性。针对履带 式起重机的的动态稳定性,需要考虑的重点是倾覆 时起重机的位增能量与倾覆因素的最大 / 小能量的 关系,从而判定起重机究竟出在何种倾覆稳定性状 态下。图1所示为履带式起重机的动态稳定性图示。 在图 1 中,用一个长方形的物体来描述履带式 起重机的动态稳定性。其中,如果倾覆因素的最大 /小能量E<G<△h,表明起重机处在稳定状态下
目前,履带式起重机被广泛应用在吊装施工中,因此保证起重机的安全作业是关注的焦点。本案主要分析了履带式起重机抗倾覆稳定性,研究结果如下:一是履带式起重机发生倾覆的主要原因是设计 方法存在问题,导致计算结果对起重机真实工况的反映失真,继而引起起重机超载倾覆;二是与 GB/ T3811-2008中计算模型的计算结果相比,履带式 起重机抗倾覆稳定性模型的计算结果偏差不大,表明将该模型应用在起重机受力分析中具有科学性。 综上研究,提出如下方面来防止履带式起重机发生 倾覆事故:(1)制定科学的吊装方案,即:在安排作业进度时,将环境、人员、设备及工程实际等因素考虑其中,并针对作业进度的影响因素,采取有 效的应对措施或适时做出调整。(2)重视人才培养, 其中包括起重机操作人员、设计人员及管理人员等 的培养。履带式起重机作业现场的操作人员及管理 人员都应具备快速准确识别并控制危险源的能力, 而设计人员应采取科学的方法来校核起重机抗倾覆 稳定性。(3)规范作业现场管理,比如在施工前, 组织开展技术交底;从环境因素、路基及地质条件 等角度进一步完善吊装方案;建立完善的吊装作业 质量体系,并在规定条件下开展吊装作业等。(4) 按要求处理路基,以保证起重机基础的倾斜度在允许范围内,注意一旦在作业中出现异常,应暂停作业, 并查明原因及彻底排查隐患。 总之,为了实现履带式起重机的安全生产目标, 应坚持“理论与实际结合”的原则,即在深入分析 起重机抗倾覆稳定性的基础上,制定与工程实际相 符的吊装方案,以防止履带式起重机发生倾覆事故。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
