专注起重机安全监控管理系统为工业安全行业保驾护航!


门座机的监控参数指的是起重机在实际作业过程中,起重量、起升高度、起升力矩、各限位保护的状态等等实际的监测数据,不局限于表 2.1 所给出的数据;具体的运行参数下。
1、起升高度信息采集:在实际作业过程中,吊钩的实时起升高度,用以提醒司机在作业时不要超过安全起升高度。起升速度的检测可以采用绝对型编码器如图 2-3 所示),将其安装
在起升卷筒上,通过检测起升卷筒上的绝对型编码器输出的脉冲数可计算起升高度。

2、起重量采集:起重机作业过程中,吊钩提起货物的实际重量,通过安装称重传感器采集如图2-4 所示,通常将该称重传感器接入到力矩限制器中。司机在作业时,通过观察力矩限制器上显示的起重量来判断所提升的货物是否超载;同时,通过对该参数的读取也计算统计每个工作班次司机室操作人员作业的总重量,节省了人力,从而可以提高起重机的工作效率。起重机作业时,起重量不得超过额定值,否则会使吊物无法被提起甚至出现危险事故,这就是安装力矩限制器的原因。

3、起重力矩采集:起重力矩在单臂架门座机上,可以通过力矩限制器(包括称重传感器和臂架仰角传感器)来获得,也可以通过臂长度架和臂架的仰角来间接计算获得到。直接使用力矩定义进行计算。起重机的起重力矩是由工作幅和起重量(包含吊具自重与吊重)的乘积。
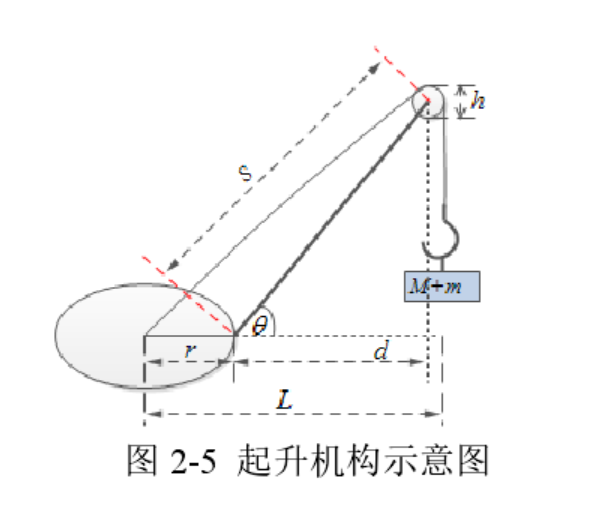
如图 2-5 所示,由物理学中转动力矩的计算公式(2-4)可知:LFT (2-1) 式(2-1)中,T 为起重力矩,L 为工作幅度。式(2-2)中,(M+m)为吊物重(可通过读取力矩限制器中称重传感器获得)g 为重力加速度(已知)。
4、运行速度采集:起重机运行速度包括变幅速度、吊钩起升速度、旋转速度和大车行走速度。运行速度可以从 PLC 中读取对应电机的速度编码器信号,进行计算处理即可得到。较为常用的电机测速方法有三种,即 M 法,T 法和 M/T 法。
1)M 法。通过计算 t 时间段内编码器的输出脉冲个数 N,电机旋转一圈所产生的脉冲是固定的 N0,则由脉冲频率 f=N/t,可以推导出电机的转速 n,如公式(2-5)所示。 t NNn
06 (2-5) M 法测速在测量过程中会产生 1 个脉冲的误差,电机转速越快时,误差越小,因此 M 法一般适用于高速测速。2)T 法。用频率为 f0 的高频脉冲,计算一定时间 T 内的高速脉冲数 M0,电机旋转一圈的脉冲数为 N0,则电机转速 n 如公式(2-6)可以得。00060MNfn (2-6) T 法速适用于电机低速运行时测速,当电机转速较低时,一定时间内的脉冲数量较多,计算误差相对较小。3)M/T 法。M/T 法测速就是结合 M 法和 T 法的各特点进行转速计算,即测量时间 t 内的脉冲数 M1 的同时,也测量 t 时间内的频率为 f0 的高频脉冲数 M=20指电机旋转一圈的脉冲数。因此可以得出电机转速 ,如公式(2-7)所示。
200160MNf Mn
(2-7) 采用 M/T 法测速时,测算结果精度很高。当电机转速较低时趋于 T 法测速;当电机转速较高时趋于 M 法测速,因此对转速变化范围比较大的电机来说比较适用。
5、累计工作时间采集:从起重机开机运行开始,到完成作业任务时间的总和,该参数可以通过软件进行计算。从起重机开机的那一刻起作为起始时间,然后起重机完成任务停止作业时作为结束时间,分别在软件中标记时间值,两个标记时间之差便为累计工作时间。通常在起重机电气控制柜柜门上也会安装时间计数器,来统计累计工作时间。
6、风速值采集:起重机的作业环境风速,当风速达到 20m/s(即阵风 8 级)以上时,将不能进行作业。当风速过大(大于等于 55m/s)时,需要对大车采取防风措施。风速测量信号采用风速仪检测,图 2-6 所示是型号为 YGC-FSFS 的风速仪,该型号风速仪主要特点有:
1)符合 WMO 世界气象组织规范(CIMO Guide);
2)灵敏度高:启动风速 0.3m/s;
3)测量范围宽:测量范围 0-70m/s;
4)精度高:精度为±(0.3+0.03V)m/s
5)有电压输出型、电流输出型和总线型可供选择;
6)能够适应恶劣的工作环境,抗击大风能力极强。

7)电机电压、电流值采集:起重机在作业时电机的电压和电流值每时每刻都是在变化的,如果电压或者电流值出现异常,起重机将无法正常工作,电压、电流值出现异常时系统会自动进行报警甚至停车,以避免发生一切危险的可能性。电机运行时的电压、电流值,在每个机构的控制变频器中都可以读取,因此可以可通过读取变频器中数据直接得到电压、电流值。
8)系统电压、电流采集:系统的电压电流是指起重机械从岸电箱接入到设备中的电压、电流,一般的电压等级有 660V、440V、380V 和 220V,当岸电箱的电压出现波动时,会使系统工作电压收到影响,当电压不能满足供电需求时会提示报警信息。系统电压、电流可以从 PLC 中读取。
9)起升限位信号采集:起升限位(包括上升限位和下降限位),限位信息采集通过限位开关进行采集,其作用是保证起重机操作人员在作业时超过设计的最大高度,同时也为防止由于操作人员的疏忽造成吊钩冲顶过卷扬,损坏滑轮严重时可能会导致臂架倾倒,引发安全事故。一般司机室作业人员通过肉眼无法观察到吊钩的起升位置,如果不安装起升限位开关,特别是在吊重的情况下很容易发生倾倒危险。
10)变幅限位信息采集:变幅限位(包括增幅和减幅),限位信息行程限位器采集。行程限位器也叫行程开关,因用途不同而叫法不同。行程开关因应用场合的不同安装时接线会有所差异,但工作原理基本上一样。行程开关如图 2-7 示,其中图 2-7
(a)是行程开关外形图,图 2-7
(b)是行程开关结构图。
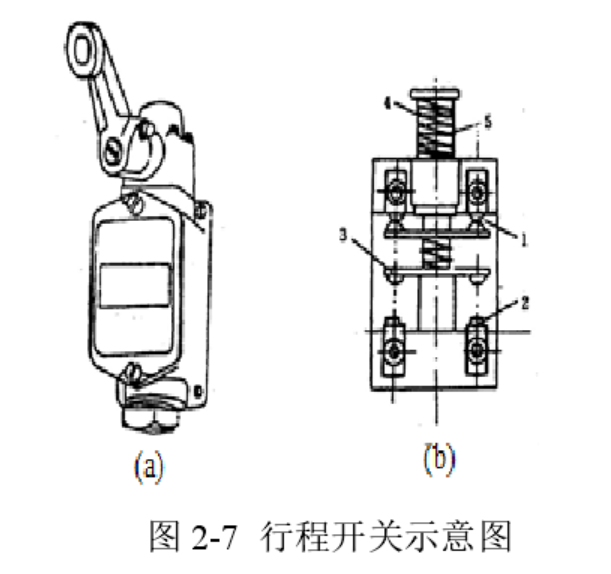
在现场安装行程开关时,可根据需要选择接通常开触点或者常闭触点。当机械
运行到极限位置时,通过限位开关可以及时给系统断电,以保护作业现场。
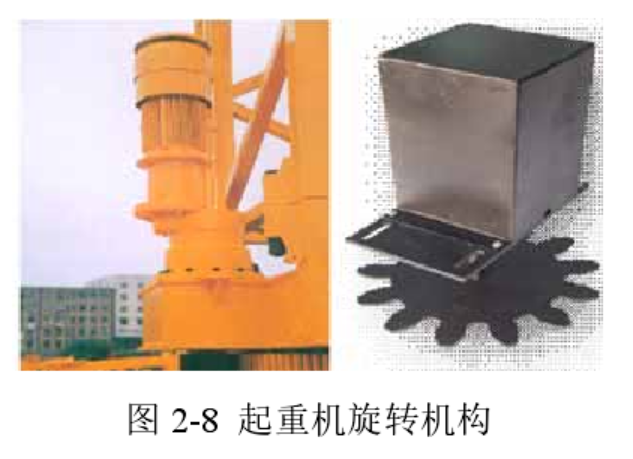
(11)旋转限位:旋转限位是指限制起重机旋转部分转动角度的限制器,作用是限制大臂转到某处设定停止,保护旋转转到设定范围内。当不设旋转集电滑环或需要限制旋转范围时,旋转机构(如图 2-8 示)应装设旋转角度限位器。根据角度传感器检测原理,角度值可以使用公式(2-11)进行计算。R360n(2-8) Φ 为旋转角度,n 为编码器旋转的圈数,r 为传感器码盘半径,R 为转盘的半径。
12)视频监测
由于起重机操作人员是在高处司机室进行操作起重机,一般离地面较高,不能通过肉眼观察地面的情况,存在很多视觉盲区。因此,需要通过安装摄像头,来监控地面工作区域的人员流动和货物堆放的位置,方便司机在作业时观察主要作业区域内的人员和货物摆放情况,主要通过臂架上安装摄像头进行观察。

本课题的视频监控采用佰视安(BESTONE)同轴百万高清 720P 工业级模拟监控摄像头[30],如图 2-9 示。该摄像头在环境视线较为阴暗情况下,将会通过自身的传感器对自动调整光线亮度,以确保在昏暗的环境中也可使成像效果比较清晰。摄像头主要有两路,一个安装在司机室,用于观察作业司机作业情况;一个安装在臂架上,用于观察地面吊钩作业区域的情况。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
