专注起重机安全监控管理系统为工业安全行业保驾护航!


随着经济全球化和区域经济一体化进程的加快,世界集装箱海运大幅增长,集装箱船舶也呈现大型化的趋势。为了增强集装箱码头的竞争力,装卸作业效率的要求越来越高,现代化国际枢纽港自动化、信息化、智能化的集装箱堆场的发展已经成为必然趋势。荷兰鹿特丹港的 ECT 集装箱码头、德国汉堡港的CTA 码头和鹿特丹 EUROMAX 集装箱码头代表了世界集装箱自动化作业系统发展的三个 阶段。
已投入试运行的厦门远海自动化集装箱码头是第四代自动化码头。在该自动化码头中,自动引导小车与岸桥、AGV与ARMG 的配合作业均可以实现全自动化,但是当 ARMG与集卡进行装卸作业时,考虑 ARMG 自动对集卡抓、放箱时的设备、人员安全以及着箱时的准确、快速要求,采用通过远程作业系统在中控室实现 ARMG 自动作业与手动作业相配合的作业方式。本文在对厦门远海自动化集装箱码头装卸系统介绍的基础上,详细阐述了 ARMG 远程作业系统的构建和实现,并对 ARMG 本机系统进行了介绍。
厦门远海自动化集装箱码头装卸系统 厦门远海集装箱自动化装卸码头设置了3 台双小车岸桥进行装卸船作业,沿码头岸线方向布置了8 个堆场。堆场海侧共采用16台全电力驱动的AGV作为水平搬运设备,负责双小车岸桥到堆垛区的集装箱搬运,堆场陆侧采用集卡作为搬运设备。每个堆垛区配备了2台 ARMG,其中一台 ARMG 配合AGV 在堆垛区的作业,另一台 ARMG 用于与集卡的装卸箱作业。 AGV 与岸桥、AGV 与 ARMG 的配合作业均可以实现全自动化,在对集卡作业时通常是利用 ARMG 在 一定阶段进行自动化作业。当ARMG 自动作业阶段完成后,会将作业控制交由位于远程中控室的远程控 制台进行手动操作。当 ARMG 对集卡进行装箱时,在任务开始后,中控室RCS启动 ARMG 的自动运行模式, ARMG 会自动运行到堆垛区合适的位置并抓取待装的集装箱,然后 ARMG 自动移动大车、小车到目标车道上方,并将吊具下降至安全高度( 离地面约 6 m) ,这时切换到手动控制,由中控室操作员在现场视频监控画面的指导下手动进行集卡对箱和装箱,装箱完毕后将吊具上升至安全高度,返回到自动模式,等待新的装箱任务。此外,通过远程维修操作台操作员还可以在远程中控室进行远程维修操作和故障诊断,方便了设备的维护、调试、故障处理。
远程作业系统相当于把传统轨道式龙门起重机的司机室搬到了远程中控室中,并将其改造成自动化轨道式龙门起重机,操作员不需要在RMG 上就可以作业,为操作员创造了良好的工作环境。
远程作业系统网络构建 目前,基于以太网的远程监控系统广泛应用于各个领域, ARMG 远程作业系统正是基于以太网及相关设备组建起来的,图 1 为 ARMG 远程作业系统网 络架构示意图。
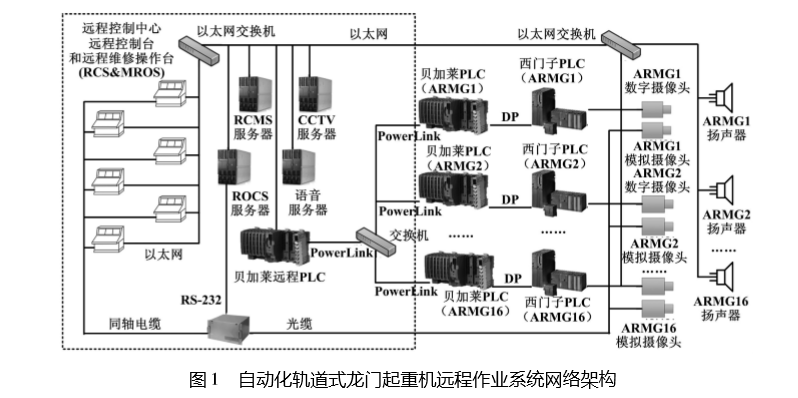
在中控室中配备有6 台远程操作台,一种是远程控制台RCS,用于ARMG 对集卡远程作业时的操作,共有5台;另一种是远程维修操控制作台,用于远程的维修操作。任一台远程控制台可以控16 台 ARMG中的多台设备。远程作业系统服务器管理着整个远程作业的任务分配和管理,并分配当前作业的 ARMG的CCTV 摄像头画面给 RCS 操作员作为操作时的参考; 远程起重机管理系统服务器提供各个 ARMG 的运行状态与故障信息 等数据服务;语音服务器提供网络语音 支持;视频服务器收集各个ARMG 上安装的数字摄像头画面并提供给远程操作台的客户端; 视频矩阵专用于吊具4个模拟摄像头 的实时画面的切换管理,可在ROCS Server 控制下使画面自动切换到当前作业的ARMG 吊具下方的视频。
中控室还配备一台远程 PLC,一方面通过 I/O 模块获取ROS 操作面板上的按钮和摇杆信息 并发送到 ARMG 上的 PLC;另一方面获取 ARMG 上的 PLC 的状态数据反馈,并在控制台上实时显示状态信息,ARMG上的PLC 与中控室内的Remote PLC 通过 PowerLink 通信。远程 PLC 也可以通过以太网将各个操作状态信息和 ARMG 的运行状态信息上传至 ROCS Server。 当 ARMG 对集卡进行装卸作业时,操作员通过RCS 上的视频画面可以获知当前现场的运行情况,通过语音系统广播语音消息,通过操作RCS 上的按钮或摇杆即可实现对 ARMG 的远程控制,实时调整ARMG 和吊具的运动,实现对集卡的远程装卸箱作业。此外,利用 MROS 可以对设备进行维护和检修。
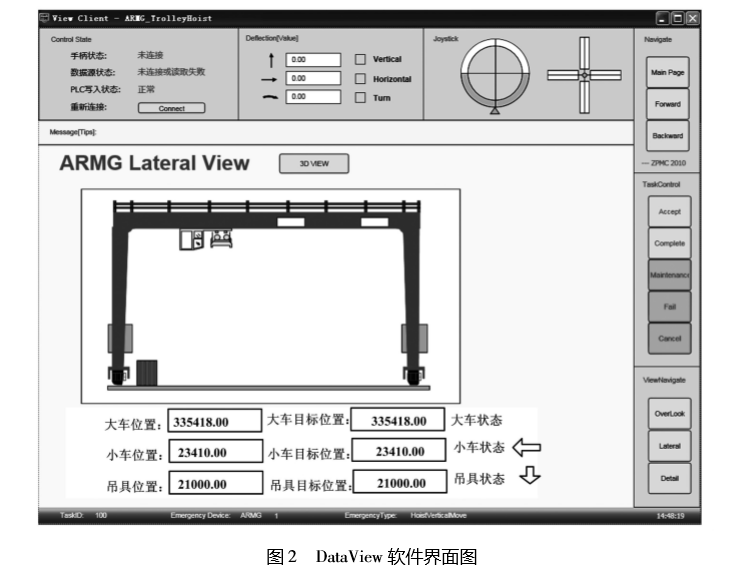
远程操作台 远程操作台ROS 主要由远程控制计算机、 3 个显 示屏、贝加莱 I/O 模块、手柄摇杆、各种操作按钮、语音麦克风组成。ROS 分为RCS 和 MROS 两种,ARMG 对集卡的远程作业操作主要通过RCS 来实现,在此对RCS作主要介绍。RCS 操作面板具有手柄摇杆 2 个,一个用于控制大车和吊具,另一个用于控制小车,操控ARMG 的运动以实现对集卡的装卸箱。除此之外,还有各种操作按钮用于远程控制 ARMG上的设备完成一些作业动作,如吊具开锁、吊具倾转,对应的指示灯可以实时显示控制状态。控制台上的语音麦克风可以与现场进行通话和广播,可以使远程操作员通过呼叫提醒集卡司机配合作业任务。 RCS计算机上运行DataView和 CCTV 客户端软件, DataView 用于操作员在对 ARMG 操作时观察ARMG 的状态信息和堆场内的集装箱层高和信息等当RCS 对某一台 ARMG 控制时,DataView 会在其中一个显示屏上显示当前 ARMG 相关的状态信息,如当前执行的任务提示信息、集装箱号、集装箱类型、集卡号、 集卡类型、设备类型、设备编号、大车位置、小车位置、 吊具高度、着箱状态、开闭锁信息等。图 2 为 DataView 的软件界面图,该界面显示了当前操作的 ARMG 的大车、小车、吊具等位置信息。CCTV 客户端软件可以在另一个显示屏上用多分屏的形式显示当前操作的 ARMG 上摄像机拍摄到的实时画面,供操作员参考。 此外,还有一个显示屏为监视器,直接连接视频矩阵,可以显示当前操作的ARMG 吊具下的 4 个摄像头画 面,以便操作员根据现场情况做出合适处理。
RCS 作主要介绍。RCS 操作面板具有手柄摇杆 2 个,一个用于控制大车和吊具,另一个用于控制小车,操控 ARMG 的运动以实现对集卡的装卸箱。除此之外,还有各种操作按钮用于远程控制 ARMG 上的设备完成一些作业动作,如吊具开锁、吊具倾转,对应的指示灯可以实时显示控制状态。控制台上的语音麦克风可以与现场进行 通话和广播,可以使远程操作员通过呼叫提醒集卡司机配合作业任务。 RCS 计算机上运行着DataView和 CCTV 客户端软 件,DataView 用于操作员在对 ARMG 操作时观察 ARMG 的状态信息和堆场内的集装箱层高和信息等。
当RCS 对某一台 ARMG 控制时, DataView 会在其中一 个显示屏上显示当前 ARMG 相关的状态信息,如当前执行的任务提示信息、集装箱号、集装箱类型、集卡号、 集卡类型、设备类型、设备编号、大车位置、小车位置、吊具高度、着箱状态、开闭锁信息等。图 2 为 DataView 的软件界面图,该界面显示了当前操作的 ARMG 的大 车、小车、吊具等位置信息。CCTV 客户端软件可以在另一个显示屏上用多分屏的形式显示当前操作的 ARMG 上摄像机拍摄到的实时画面,供操作员参考。此外,还有一个显示屏为监视器,直接连接视频矩阵,可以显示当前操作的 ARMG 吊具下的 4 个摄像头画 面,以便操作员根据现场情况做出合适处理。
网络服务方案 ROCS 服务方案ROCS 服务器用于安装 OPC Server 程序和ROCS 程序。ROCS 服务器上运行的 OPC Server 负责收集 ARMG 的 PLC的数据和发送指令给 ARMG。ROCS 程序分为两部分: ROCS Service和ROCS Client。ROCS Service无界面运行,作为一个 Windows 服务安装在ROCS 服务器中ROCS 程序通过 OPC Server 获取 Remote PLC 所提供的数据。Remote PLC 获取两类数 据信息并发送给 OPC Server: 一类是Remote PLC 通过 PowerLink 总线从 ARMG 控制系统收集而来的关于ARMG的一些设备信息,如 ARMG 的模式、车位置、升高度、开闭锁等,用于 ROCS 生成远程控制任务以及 判断设备位置和精确地切换视频等; 另一类是 Remote PLC 通过 I/O 模块获取的ROS 操作面板的各种按钮、 摇杆的操作状态信息,用于 ROCS 管理远程任务状态 和分配远程任务等。ROCS Client 是一个 Windows 应用程序,可以对 ROCS Service 使用的一些数据源进行修改,如 OPC Server 配置参数、视频矩阵串口配置参数、以太网端口配置参数等。ROCS Client 还可以观察ROCS Service 运行时远程任务和ROS 操作面板的状态,可以调整远程任务的优先级,可以配置 ROCS Service 所使用到的视频分配规则、语音分配规则、RCS分配规则等设置。
RCMS 服务方案 RCMS 服务器主要安装RCMS 程序以及 OPC Server 程序。RCMS 程序主要用于收集各个 ARMG 的运行状态、运行速度、故障、各机构信息等数据,用于对 ARMG的维护、故障提示及各机构运行效率、时间的统计等。RCMS 上的OPC Server 为RCS 上的DataView 提供数据源。此外,RCMS 程序还可以对岸桥的故障信息、设备维护信息进行管理,具备实时数据监控、历史数据查询、报表生成和导出等多种功能。
CCTV 服务方案 CCTV 服务有两种,一种是基于网络视频服务器 CCTV Server 和数字摄像头的全数字化远程视频集中监控系统,另一种是基于视频矩阵和模拟摄像头的模拟视频监控系统。CCTV Server 前端监控设备将采集好的图像进行编码上传至网络,通过光纤传输到中控室,在中控室建立网络视频管理平台,通过客户端软件在 RCS 上显示出来。网络视频管理平台基于C/S 架构,集中配置管理,统一分配用户权限,引入用户组概念,支持多用户区域管理,具备视频回放功能,可进行数据存储、流媒体转发。 每个 ARMG 吊具的4 个角上各安装有1个吊具摄 像头,用于观察锁头、锁箱和对箱情况。RCS 上的监视 器可以在 ROCS Sever 的控制下自动切换到当前作业的 ARMG 的吊具摄像头视频画面。 监视器显示为4 分格,分别对应 ARMG 吊具4 个角 上的摄像头。当 RCS 无任务不需要操作 ARMG 时,监 视器则为待机黑屏状态。
语音服务方案 语音系统由麦克风、扬声器、语音服务器组成,并 通过以太网连接。每个 ROS 控制台安装了一个麦克风。扬声器安装于每个堆垛的集卡交换区的车道上, 一个车道安装一个扬声器,整个码头24 个车道一共安装24 套扬声器。语音服务器位于中控室的机柜内,内置数字语音系统,用于控制麦克风与扬声器的多对多的切换、管理和控制。 5 ARMG 本机系统 ARMG 的实时位置会通过 ARMG 的本机 PLC 检测并通过通信网络反馈到中控室的ROS 控制台,以便于操作员实时了解ARMG 的运行位置。ARMG 上装有数字摄像头,用于对作业现场总体情况的监控。吊具上的模拟摄像头用于作业时堆箱的监视,便于中控室操作员准确高效完成对箱操作。
轨道吊大车定位是通过霍尔磁铁和绝对位置编码器来实现的,两者互相校验决定大车位置的有效性。 小车定位通过磁尺实现,并辅以安装 3个绝对位置校验点,用于对磁尺的校验,实现对小车的精确定位。此外,每个堆垛区的两台ARMG 会使用防碰撞技术,当两台 ARMG 的位置小于安全距离时,各 ARMG 的 PLC 会控制大车减速、停车并给出报警信息。起升卷筒旁 安装有绝对位置编码器,对吊具起升高度进行定位。小车的底部安装有传感器,用来检测吊具与小车底部的绝对距离和吊具的水平度、旋转度以及运行过程中吊具的摇摆程度。 当 ARMG 的小车进入集卡交换区时,空载时吊具底部或作业时集装箱的底部必须在安全高度以上运行。当小车运行到目标位时,只有远程中控室监控人员确认安全后,方可进行装卸集装箱的动作,确保集卡及集卡司机的安全。当小车运行到目标位时,远程中 控室操作员通过装卸位侧面的信息指示牌或者语音系统提示集卡司机离开集卡驾驶室进入安全岛。当集卡司机按下安全岛内的工作按钮时,远程中控室监控人员确知集卡司机已经进入安全岛,再进行装卸集装箱 的动作,从而确保集卡司机的安全。
轨道式龙门起重机远程作业系统是集计算机控制技术、传感器检测技术、网络技术、信息技术等各种智 能技术为一体的复杂系统,也是自动化集装箱码头总 体系统的重要分系统之一。ARMG 远程作业系统 实现了在中控室的任意一个RCS 操作台上完成多台ARMG 的远程作业操作,提高了设备利用率。操作员 在远程作业中控室的工作环境更加舒适,只需要对 ARMG 的控制进行少量手动操作,就会进一步降低工 作强度。 远程作业系统是基于以太网建立的,除了已实现的在中控室进行远程作业的功能,还可以很容易地对系统升级,将设备运行状态接入到互联网,实现远程状态监测,为码头应对未来的升级提供便捷的接口和平台。厦门远海自动化集装箱码头轨道式龙门起重机远 程作业系统的成功应用可以为我国后续的自动化码头中的集装箱远程作业系统的设计提供重要参考。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
