专注起重机安全监控管理系统为工业安全行业保驾护航!


起重机安全监控系统需要通过硬件与软件的相互作用来实现,一般情况下硬件部分的信息采集采用智能传感器技术,结构无损检测等方式,需要通过相应的软件来进行分,针对不同状况下的应用场合,传感器的选用与布点以及监控软件的展现形式各有差异,提出本文的港口门机安全监控预警系统的总体方案设计。
本系统包括三个子方面:应力应变监测、风速风向监测和位移监测。系统实现人员
管理、项目管理、设备管理、阈值管理,各监测系统采集数据的统一汇总和报警信息的
统一管理。本系统提供了清晰合理的人机交互界面,使用者可以简单方便的操作,包括
各类监测数据的处理分析与管理,该系统的主要功能如下:
1)系统可以实现远程的自动化监测,不需工作人员进行监控,自动化采集仪可以实
现实时的数据信息采集,也大大的减轻了维护人员在高空作业的时间与次数。
2)可以描绘出传感器所安装在结构件的具体位置、整个设备位置及各类传感器编
号等等,能够录入与门机作业相关的信息,这样能有效的管理传感器。
3)可以对监测的数据进行预处理,对数据进行滤波、数据分析分类等,提高整个系
统的精确度与可靠性,给后续的分析提供较好的信息源。
4)可以显示门机作业时各项传感器实时的监测数据,也以将待测结构的各项传感
器的历史数据以图表和列表的形式进行显示。
5)系统可以实现对采集到的数据进行分类分析处理,实现数据的统计、结构故障的
位置识别、结构安全性的预警等功能,并以数据库的形式给予存储。
6)系统为了保证在线安全监测预警系统的安全合理运行,对管理者需要身份的验
证,也具有监测、修改、增加与删除等不同功能。
7)本系统可以实现对各类传感器的监测数据进行综合统一的管理,只要从数据库
中调用所需要的数据信息,从而大面积为管理人员解决了多种采集系统综合管理的困难。
8)安装现场监控系统,便于作业人员的每日查看,若结构出现损伤而产生报警时,
现场监控系统会自动显示报警信号,远程监控系统与手机端,同样也可以收到报警信号,能够实现在发生故障时,第一时间提醒工作人员,减轻不必要的损失。
9)本系统设定了预警阈值,能及时的对可能存在损伤的结构部位进行预警,准确的
显示出存在隐患的结构件,根据监测数据的变化情况提出控制、应急措施。
10)实现大量历史数据的储存,门机上进行数据备份对硬盘要求较高,每台门机均
需要硬盘,故此会增加预算。数据通过无线传输上传至监控平台,做到长期的数据储存。
随着工业自动化领域的快速发展,大型危险起重设备的结构越来越复杂,因此在进行
SHM 系统研究时,需要监测的部位也越来越复杂,在监测点较多的情况下,可能造成数据信息传输过程中出现混乱,从而影响监测数据的准确性。所以,将采集到的数据由自动化数据采集仪进行统一处理发送到监控平台系统端,既避免了数据的分散式处理,又保证了系统数据的整体分析统计与存储,同时也节省了较多的采集设备。这种将所有传感器采集到的信号集中于一起,信号同时传送至监控平台系统,称为集中式监测系统,如图 3.1 所示,集中式监测系统的特点如下:
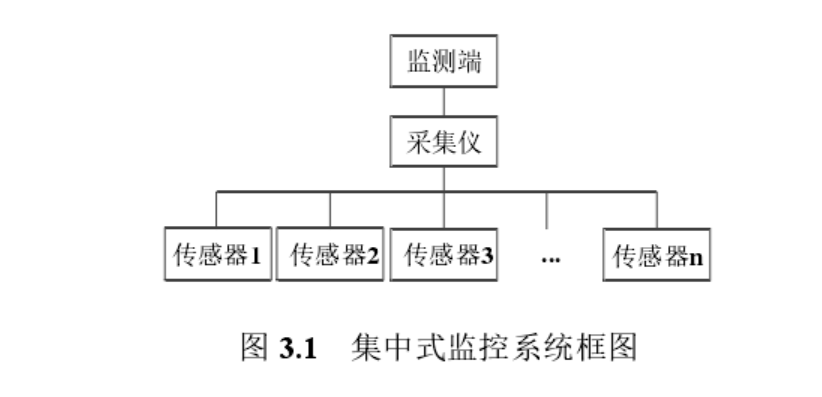
1)统一性,即它是个统一的系统,方便整个系统数据的采集与处理,以及后期数据
的查看,统计与储存。
2)独立性,即处于集中式监测系统的各类传感器之间都是相互独立的。
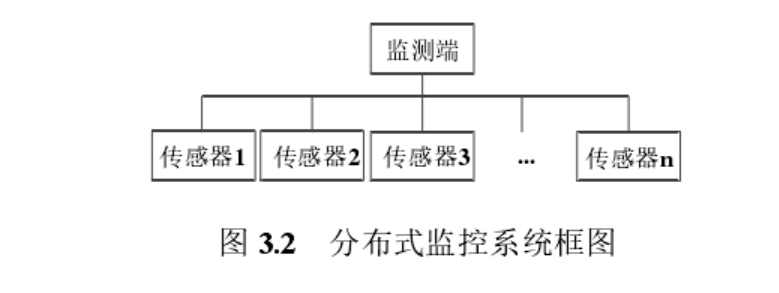
3)便捷性,即便与数据的综合采集,处理和存储,节省了较多的采集设备,以免造
成不必要的麻烦。在不同监测点处安装不同的监控系统与采集设备,可以利用无线通信模块与监控系统之间通信。每个整套设备负责一种数据的监测,进而达到分布式监测目的,与中式系统相对应,即有为分布式监测系统,如图 3.2 所示。
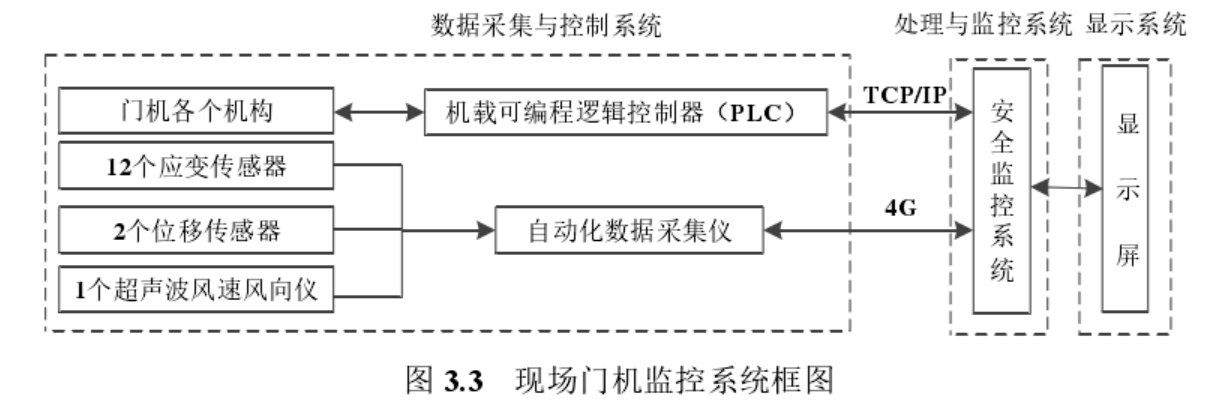
本设计采用集中式现场监测系统对门机实施监测。现场监控系统主要由采集与控制系
统(自动化数据采集仪、应变计与位移传感器、超声波风速风向仪),处理与监控系统
安全监控平台系统)、无线通信系统(无线数据终端)、存储系统等组成,门机监控系统框如图 3.3 所示。现场门机监控系统主要负责对门机作业时的结构状态和风速风向进行实时监控,采集系统通过 RS485 串口连接 4G 无线数据终端,安全监控系统软件以图表、列表及数值等形式向用户清晰显示门机作业情况下结构状态的变化,对其布设了相应的预警指示,同时也可对数据进行实时储存与统计,本系统历史数据存储为连续 60个工作日,通过无线网络数据传输方式将采集的监测数据上传至数据服务器,从而实现了门机结构状态的实时监测。
远程监测系统方案
三层 C/S 模式C/( SClient/Server),即客户端/服务器端,它作为软件系统的结构体系,三层 C/S结构主要由表示层、功能层与数据层组成。表示层主要是用户和应用软件的连接口,它主要承担应用软件和用户之间的通信,对于查看客户用键盘等等键入的数据信息,展示出应用软件的各种输出数据信息。应用的主体即为功能层,它主要将要处理分析的数据逻辑编写入程序中,主要进行编程输入手段。功能层与表示层间数据的传送应尽可能的简单明了。功能层中,需要有应用与数据库历史数据存储和获取及可以记录整个系统故障理的功能,其中的程序绝大多数是由可视化程序设计的编程工具研发的,也使用C 与 C++语言。数据层主要担任数据库管理系统担任数据的读写,数据库的管理系统应该快速地执行批量数据的检索、查找与更新,三层 C/S 的具体方案为:三层结构需逻辑相互独立,但也需要明确的分割,数据层已经以数据库管理系统身份独立出来,主要的枢纽要将表示层与功能层分割成为接口简明易操作且互相独立的程序。
远程门机监测系统方案
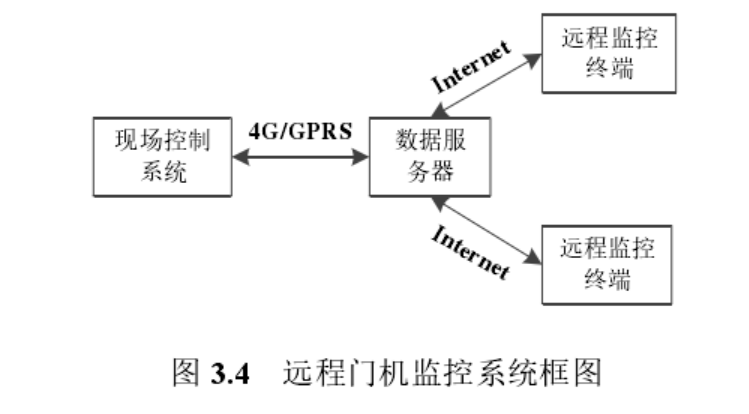
本文基于三层C/S 模式的结构提出了门机的远程监控系统,主要由现场监控系统、数据服务器、远程监控客户终端组成,现场监控系统主要负责通过自动化数据采集仪将应变、位移、风速风向传感器采集的门机各结构状态的数据信息,通过 4G 无线通讯方式将数据进行分析处理发送至安全监测平台软件进行显示及数据统计存储,采用无线网络将数据发送到远程数据服务器,远程监控端可以通过 Internet 来登录数据服务器,从而得到门机作业过程中的各结构变化的实时数据信息,从而实现对港口门机结构健康状态的远程监控。远程监控系统结构如图 3.4 所示。
系统方案细节
硬件选型:
设备监测的硬件选型的合理性是保证监测数据实时有效的重要保障,由于设备需要长期的监测,则硬件选型与数据的传输通信则成为本系统设计的一个重要点,而且监测部位的空间相对狭小,所以对仪器的外观尺寸具有一定的约束,另外监测的对象是钢结构,且钢结构的温度效应相对较大,且长期暴露在盐碱度较高具有一定腐蚀性的环境恶劣的港口;则仪器需要定制出尺寸规格相对合适,能够适应耐腐蚀与高低温循环等特性的设备。综合各方面情况本系统的硬件如下:
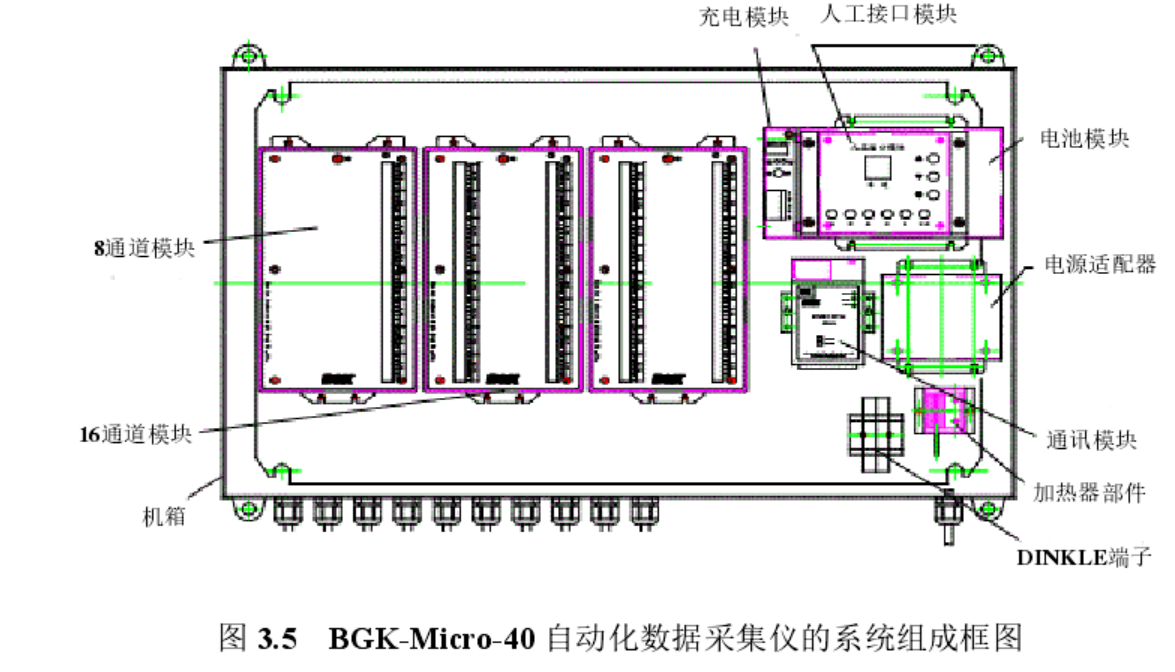
1)数据采集仪:选择 BGK-Micro-40 系列自动化数据采集仪,自动化数据采集仪应用混合式测量电路,可以对目前市场有各类传感器测量与记录。由 BGK-Micro-40 系列自动化数据采集仪组成的自动化网络监测系统特大范围的应用在公路、桥梁、边坡等多种场合中。自动化数据采集仪由防潮机箱,箱体内部由 8/16 通道测量模块、电源管理模块(或称电源块)蓄电池及电源适配器组成,同时预留光纤通讯模块、GPRS/CDMA 无线通讯模块、人工读数接口模块、加热器等选配部件的安装接口。自动化数据采集仪的整机组成情况如图 3.5 所示。
自动化监测系统包括 BGK-Micro-40 型自动化数据采集仪(内有测量模块)、智能仪器(独立网络节点)等,利用配套软件可以简单实现对各类部件的自动监测、数据分析与处理、图表列表显示、异常情况报警灯功能。图 3.6 为 BGK-Micro-40 自动化数据采集仪的系统结构框图。
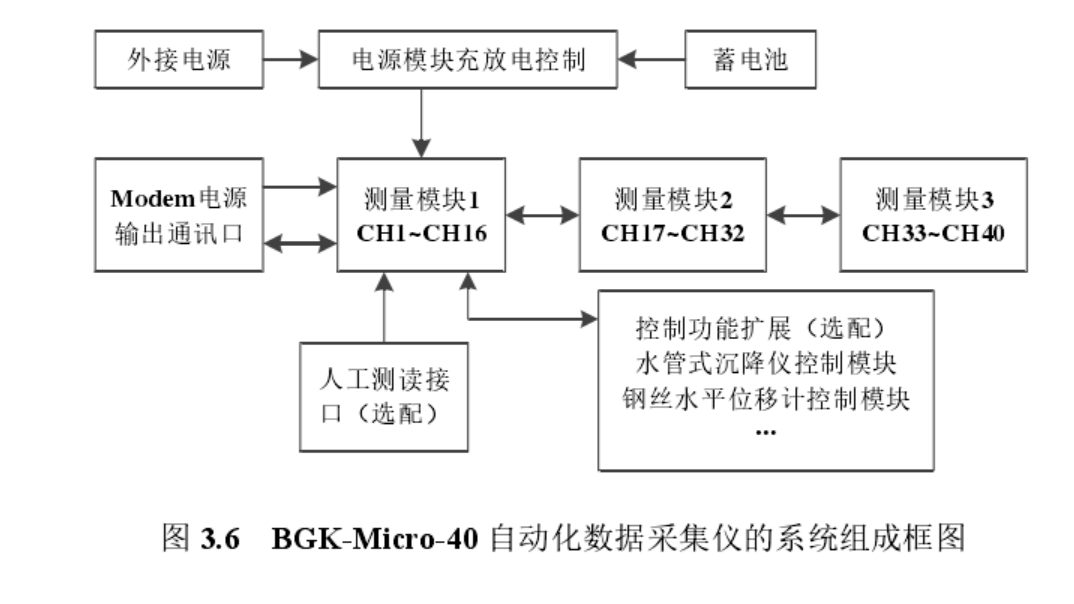 图3.6 为自动化数据采集仪的内部组成,拥有超好的防电磁干扰、防潮及防尘作用,采用 RS-485A 总线通信方式,可以把多台自动化数据采集仪进行组网,从而结合成一个
图3.6 为自动化数据采集仪的内部组成,拥有超好的防电磁干扰、防潮及防尘作用,采用 RS-485A 总线通信方式,可以把多台自动化数据采集仪进行组网,从而结合成一个
规模宏大的采集系统。该采集仪内设计有防雷电源管理系统,主要担任管理系统供电和充电,控制免养护的蓄电池充放电并且为采集仪供应电源,如果外源因故中止供电,则电路自动切换成蓄电池供电。不使用外接电源的情况下,在电充满的前提下内设有免养护电池可以大约待机 7 天,该自动化数据采集仪具有直流供电的端口,在不用其他额外的设备支持下,也可直接插入直流电源或者利用太阳能电池板进行供充电。自动化数据采集仪内设有测块,简为 VR 模块,也称为混合式测量模块,任何通道都可以接入振弦式、差动电阻式、应变式、标准电压、频率等类型的传感器或仪器等,系统的自检查、测量和控制、数据储存与通信以及电源的管理等等主要通过采集仪内部的 CPU 时钟、A/D 转换器、储存器等来实现。模块被封装于金属盒里,设计有通信端口和电源等连接口,VR 模块上设计有 16 个通道,可以连接 16 个仪器,如果需要接入更多的设备,则要添加相应的测量模块,且每个采集仪最多只能接入 40 个设备。如需接入更多仪器,需要增加,每个自动化数据采集仪最多可接入 40
支仪器。测量模块的正面为传感器接线端子,有 8 与 16 通道两种,每个通道的接线端子顺序如图 3.7 所示,通道的测量类型由软件设置。
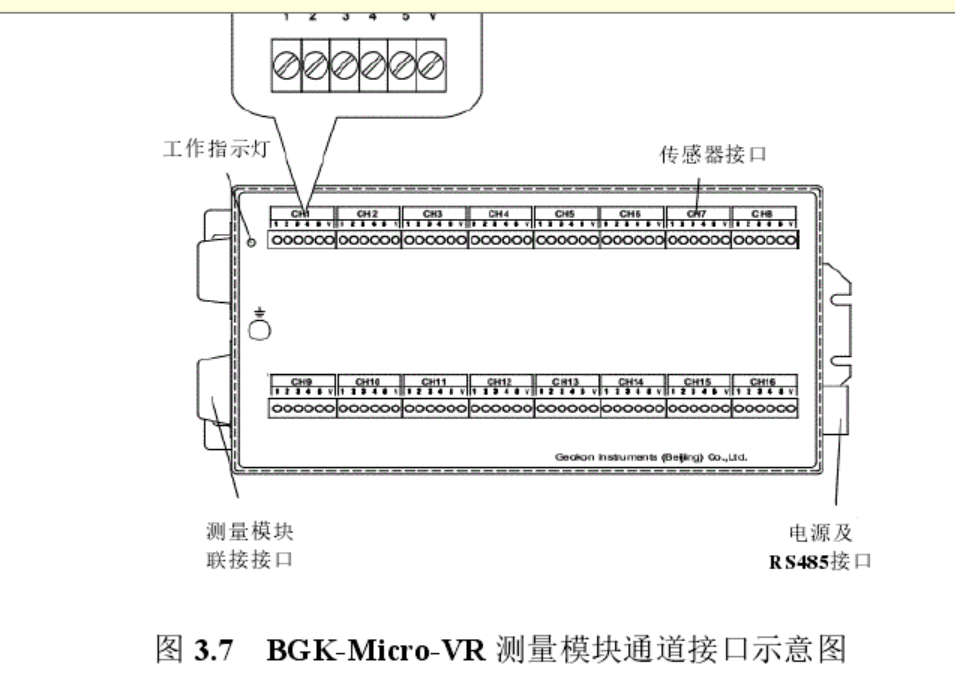
测量模块具有较多功能:控制远程监控系统,采集接入传感器的数据信息,通过自检查功能,将各模块的信息情况及时精确地反馈给上位机,实时的数据存储与保护功能,可以照用户自己的需求进行测点的选择实现混合式测量方法。
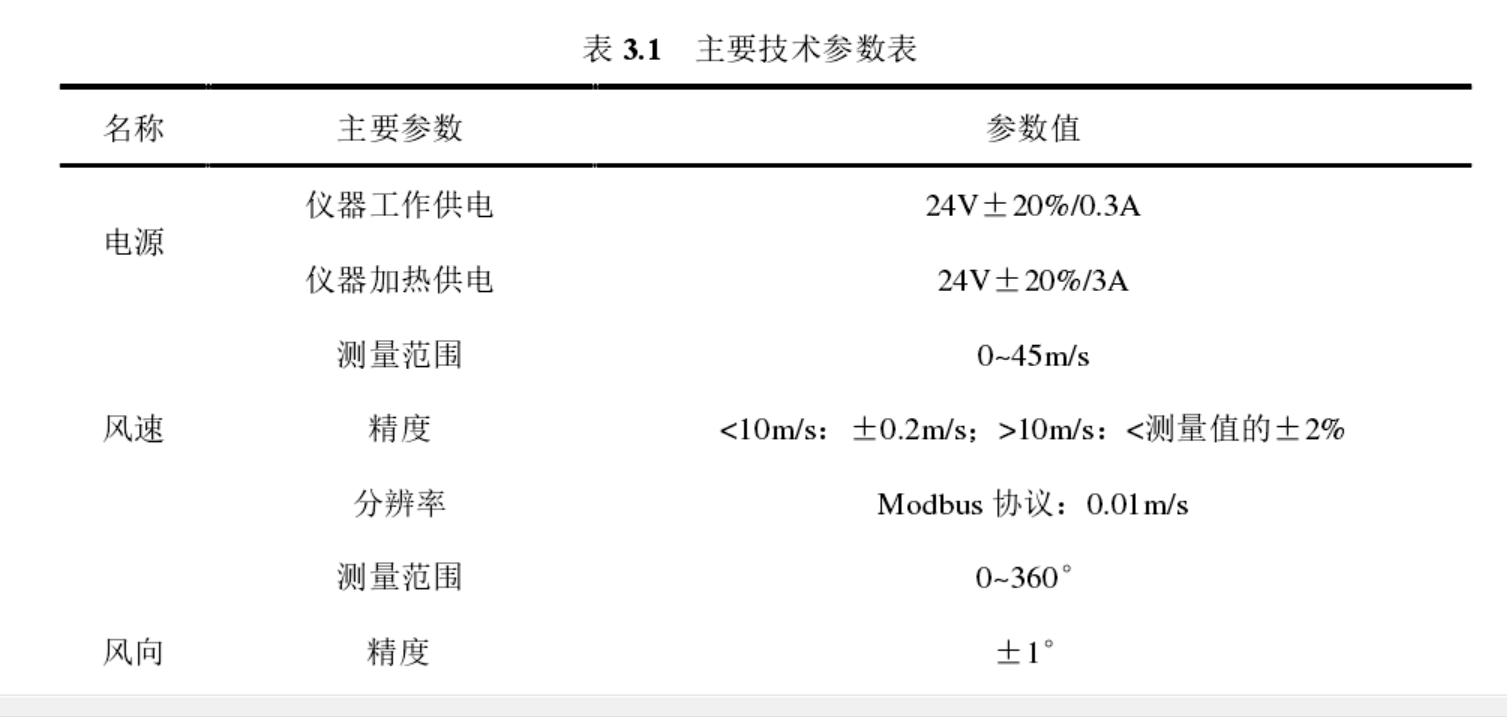
2)风速风向传感器:选择用 PH-YT2 超声波风速风向传感器,本系统采用的输出信号为电压型。它是用超声波风速风向传感器合成的全数字类型测量且具有超高精确度的一种传感器,依据用户的需要内设的分析处理单元可以相应的输出对应的信号,可以迅速且精确地测量出风速与风向信息。因为拥有较高强度、轻小紧密且无移动件的设计结构,所以其能环境气候较为恶劣中精确地测量,具有精确可靠、低运维、开放性通信等特点,被广泛的应在港口、海洋、实验室与交通等领域。PH-YT2 超声波风速风向传感器的主要技术参数如表 3.1 所示。
PH-YT2 超声波风速风向传感器的具体特点有:利用声波相位补偿技术,使其准确
性和可靠性更高;利用随机误差识别技术,在较大风的情况下也能保障较低的离散性误差,使其稳定性更高;利用数字滤波技术,雨季、雾天的测量补偿技术,使其抗干扰与环境适应能力更高;先进的科学技术与特有的整体结构保障了超声波风速风向仪能够适应较为恶劣的作业环境,同时也提高了其精度、可靠性与稳定性,较大的减轻了作业停止时间与维护人员的工作。
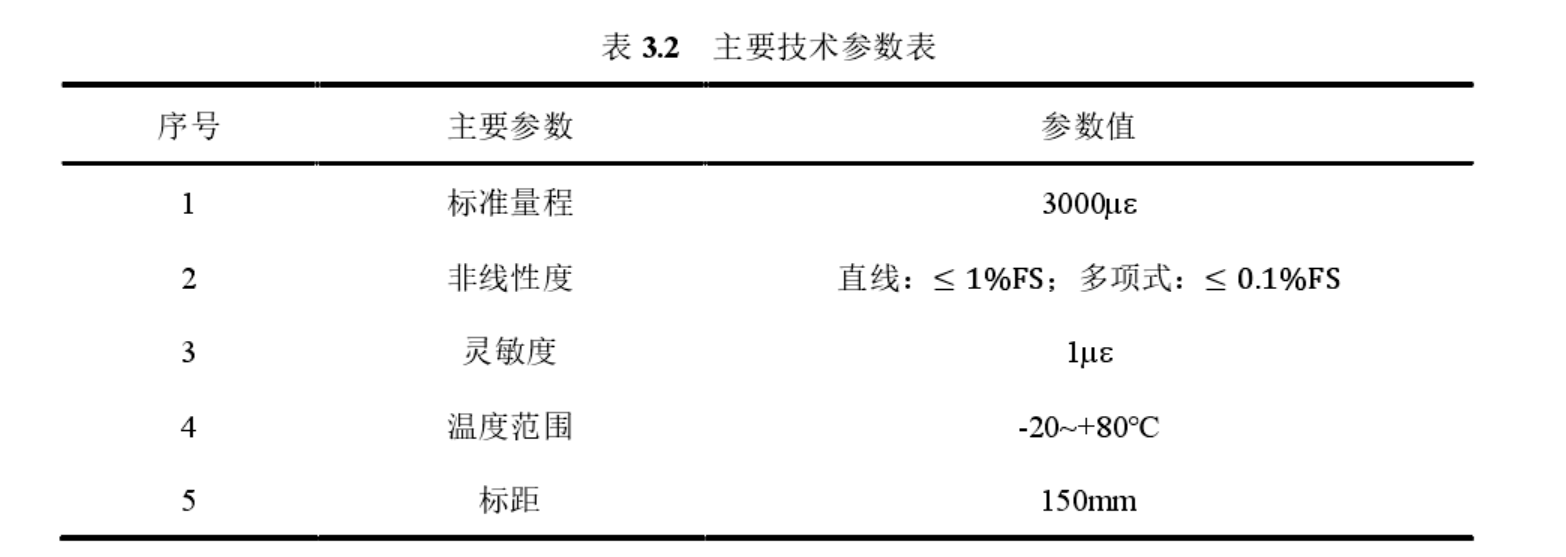
3)应变传感器:选择用 BGK-4000 振弦式应变计,其主要用于桥梁、钢板、支撑及管线等各类结构的应变监测,仪器主要安装在结构表面来及监测结构件的应变情况,可以用粘结或钻孔方法,最多的是用电焊或螺栓将两端的块固定在待测结构表面。仪器与待测结构的温膨胀系数非常接近,需要待测结构温度修正时,内设的温度传感器可以时的监测待测位置的度,该应变计使用的是不锈钢结构,因此具有较高精度、可靠性、稳定性、优越的防水性与耐腐蚀性能,利用四芯屏蔽式的电缆传送各种信号,而且电缆的长度不会影响频率的信号,特别适合在门机这种作业复杂且潮湿的环境下长期的测量结构的应力变化。BGK-4000振弦式应变计的主要技术参数如表 3.2 所示。
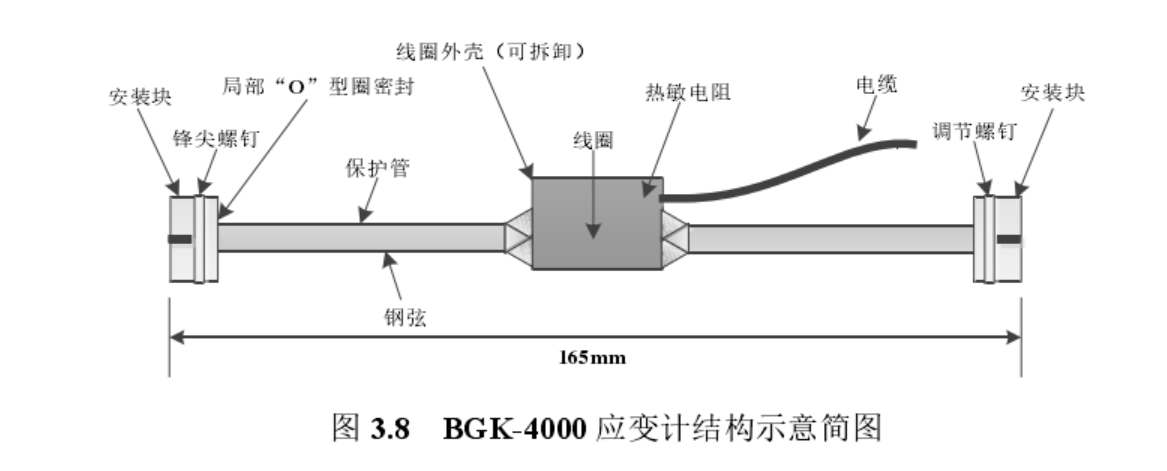
测量原理:两个安装端块间具有一定长度的钢弦,端块利用焊接或螺栓方式安装于被测结构的表面,被测结构变形将会导致两端块间具有相应的移动,导致钢弦的张力变化,从而使其谐振发生改变,因此可有效测量结构的变形情况,与钢弦较近的电磁线圈来检测仪器生的信号激励和读数情况。BGK-4000 振弦式应变计的结构如图 3.8 所示。
4)位移传感器:选择用 SDVB20 系列回弹式 LVDT(Linear Variable Differential Transformer)位移传感器,属于直线型位移传感器,可以说为可动铁芯型变压器,它主要包括一个初级线圈、两个次级线圈、线圈骨架和铁芯等重要结构,其测量过程中,为了保证不产生非线性的数值,则铁芯的移动不能超过线圈的线性范围,而且每个 LVDT都有一线性的范围,在具有较大灰尘且相对潮湿的恶劣条件下也可以以低功耗精确地方法测量数据,且无滑动触点具有较长的寿命。检测探头和传感器相连接,接触探头利用耐磨性较好且镀络硬质的工具钢或平头,中间部分采用弹簧进行连接,当探头感触到待测物体时,探头将会往回缩探头的压缩量即为待测物体的位移量,采用弹簧,每当待测结构离开时,探头将会自动复位,因此待测结构的变形量与位移量会被快速的测出来。
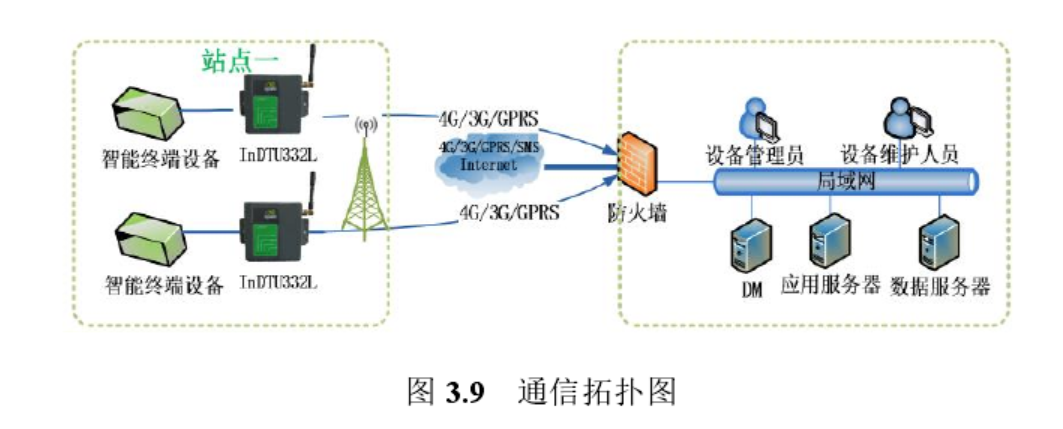
5)传输模块:选择用 In DTU332 无线数据终端。In DTU332 系列工业无线数据终端,主要的承载网用 2.5G/3G/4G 网络,给用户提供了 TCP/IP 以上的无线传输通道,利用现场监控设备和中央控制设备之间的无线通信实现了远程传感器数据采集与控制。通信拓扑图如图 3.9 所示。
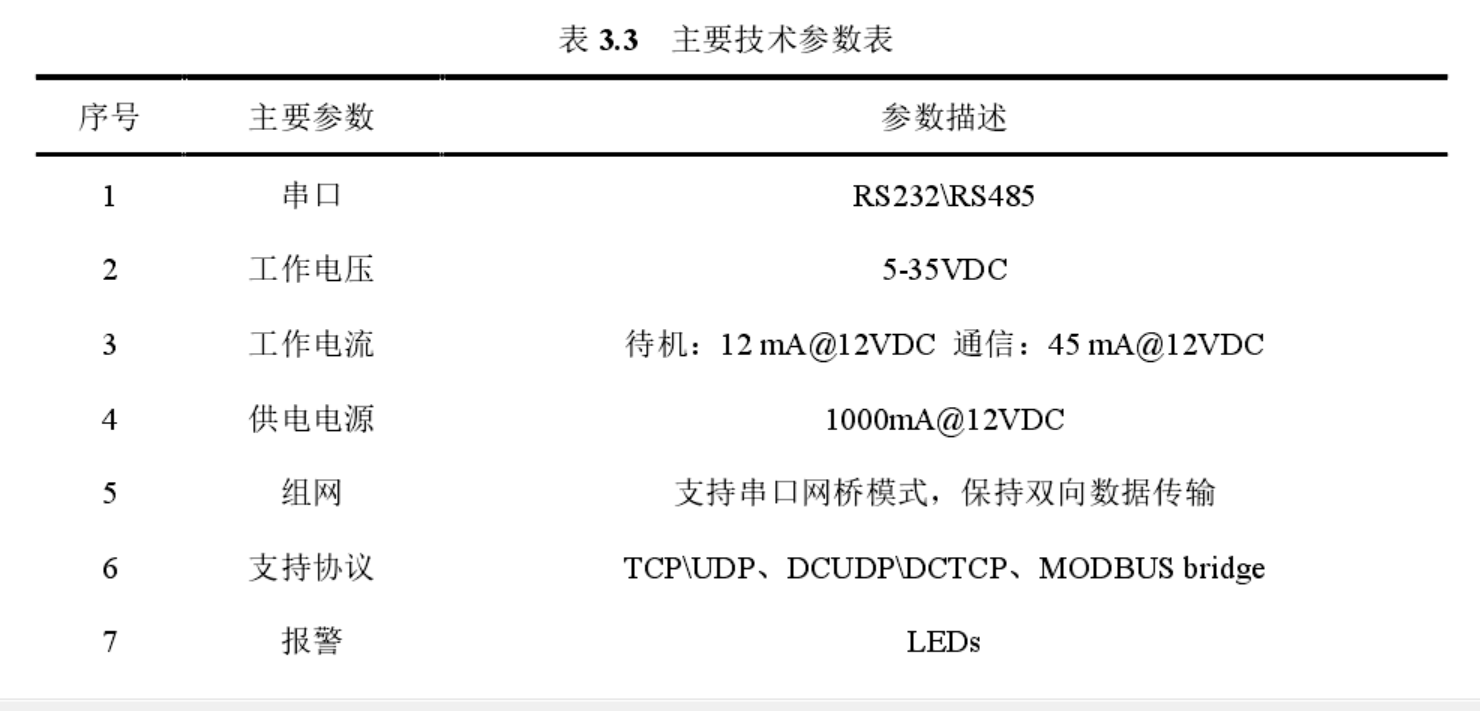
In DTU332 无线数据终端,是一种 GPRS 数据传输模块,内设有 CDMA 1X 或 GPRS无线网络模块,具有高功能、高安全、低功耗等特点,In DTU332 无线数据终端的主要参数如表 3.3 所示
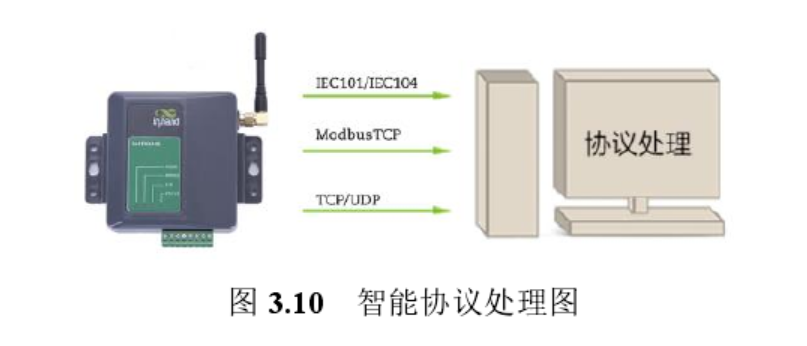
In DTU332 系列的设计利用的是全工业级的芯片,紧密型的结构设计并且重量超轻。从而保障在环境恶劣且无人值班情况下现场的安全稳定的运行,特低的功耗,方便用电相对难的工业现场。支持 IEC101/IEC104 相互转换,无缝联接主站与现场监控终端;支持 Modbus TCP/Modbus RTU 协议转换,无缝联接现场工业装置;支持用户自定义 TCP/UDP 登录、心跳报文来监测网络储存器的运行情况,较强的现场识别能力,便捷实用。具有智能协议处理如图 3.10 所示。
数据预处理
门机所处的环境相对来说较为复杂,系统数据的测量将会受到一些传感器噪声与随机干扰的影响,本控制系统引入中值滤波算法来处理噪声,来提高整体系统的精度与可靠性。中值滤波是一种能够特别合理有效的抑制噪声的非线性信号处理技术,具有较小的无偏差性,其最大的特点是:能够剔除由于随机偶然因素而造成的波动干扰,进而得到真实情况的有用数据。
Nixmedygi},{)(=(3.1) 式中, yg)( 为滤波后的当前数据点,ix 为第 i 次采样的数据点,N 为滤波窗的宽度,综合考虑本系统选取 N=9。具体流程如图 3.11 所示。
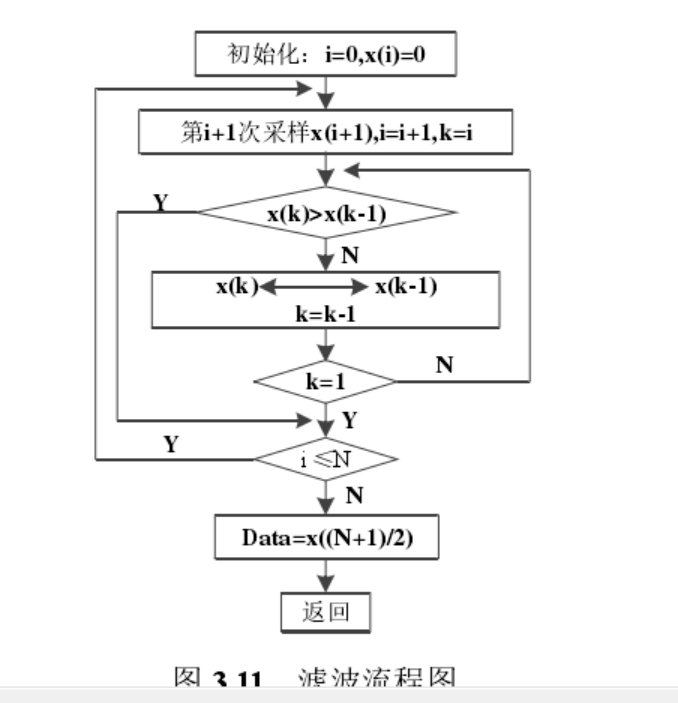
利用中值滤波算法对数据信号进行计算,达到两个效果:
1)明显降低系统数据中的“尖锐”噪声,使得整个监控系统具有姿态的调整收敛属性,使统变得平稳预警信息相对准确;
2)降低了门机的安全监控系统外的其他被动扰动与测量单元传感器自身的噪声干扰,避免这些扰动或者干扰在监测过程中被逐渐放大,因此影响整个监控系统的精度与稳定性,预警信息的准确性以及减少维修人员不必要的检查。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
