专注起重机安全监控管理系统为工业安全行业保驾护航!


在造船上的实际工作场景中,常常用到龙门吊和塔吊,塔机的吊装高度往往小于龙门吊,也就是说龙门吊在上方,塔机在龙门吊下进行工作,由此就会产生许多盲点盲区,对吊装司机的工作产生障碍和安全隐患。恺德尔针对造船厂的实际工作背景下,阐述通过起重机安全监控管理系统GPS高精度定位技术监控管理相邻机械间的防碰撞。并介绍起重机安全监控直观的图形化仿真监控软件,实时及事后回放机械作业动态情况的功能。
GPS在物流领域已被广泛应用,可在环境恶劣场所工作、不易受外界干扰、定位精度高、投资成本较低, 本系统采用双GPS检测塔吊的位置与转向角度,确定塔吊及起重臂前端的位置,采用单GPS检测龙门吊的位置,从而实现塔吊之间及与龙门吊的实时位置监控和防碰撞;所有实时工况均在一台控制计算机屏幕上显示,实现多台塔吊、龙门吊的集中监视和防碰撞管理。
整体系统可分成三个分系统:系统监控分系统、GPS基准站分系统、移动站分系统。为满足差分数据、定位数据的发送、控制指令的接收,建立200M、400M的无线数传网络通讯系统,实现差分数据、机械定位数据与控制指令的实时传输,相互间的关系如图1所示。
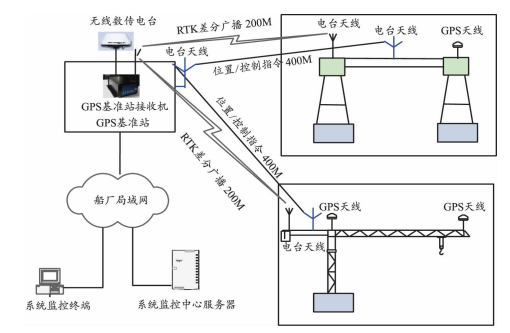
图1
控制系统软件分为GPS数据处理中心软件与可视化监控软件,数据处理中心软件运行在服务器上,实现数据的后台处理,以及数据库的存储与查询;监控终端上运行可视化监控软件,展示场区作业状况包括作业机械位置、船厂地物等要素、显示机械的运行状态、作业机械位置监控、监控作业龙门吊以及塔吊与起重臂的位置和状态、可指定任意作业机械实现跟踪漫游,三维软件界面如图2所示。
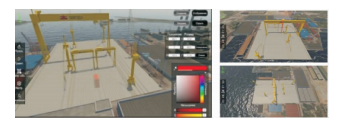
图2
机械安全防碰撞控制,根据各龙门吊位置以及塔吊的起重臂实时位置计算判断,如相邻机械运动过近,就会触发报警及安全防撞控制信号,通过PLC控制龙门吊及塔吊起重臂的运动减速,在达到限定的距离时采取停机的控制,保证了作业的安全,同时在监控系统界面上给出报警提醒。
GPS基准站分系统产生GPS差分改正数,通过无线数传电台向机械上的GPS设备播发,各GPS设备接收GPS基准站播发的差分改正数,实现RTK高精度定位,并利用双GPS的相对定位数据计算出塔吊行走台车和起重臂顶端当前的实时高精度位置,单GPS计算出当前龙门吊的位置,结合编码器及机械尺寸,塔吊和龙门吊的位置经过综合处理后,通过无线数传电台发送给基准站,基准站再转发到中控室服务器,经综合处理后,监控系统在地图上实现对各塔吊及龙门吊的位置状态的实时监控。
GPS基准站主要功能为生成、播发差分改正数,差分信息通过无线数传电台链路播发出去;差分信号需要覆盖整个船厂作业区。基准站设备包括GPS基准站接收机,GPS天线和数字电台及天线,以及UPS供电设备。基准站天线安装在开阔地点,应保证其周围没有较高的遮挡物。实现高精度RTK定位的基准站差分有效距离约 10km,一个基准站可满足整个船厂作业区的差分需要。基准站接收板卡采用国际品质的双频多系统板卡,系统满足北斗二代 、GPS、GLONAS多系统信号的应用,输出CMR,RTCM 等多种差分格式, 满足各类卫星定位产品的差分定位需要,方便未来扩展接入其他类型的卫星定位产品。
移动站设备包括GALAXY IPC-PD控制器、电源模块、1个GPS天线和2 个数字电台及天 线。GALAXY IPC-PD控制器内部集成高精度双频多系统定位板卡和嵌入式控制板,该控制器采用了防水和防尘封装,适合于船厂使用环境。GPS天线和电台天线安装在龙门吊顶端,GALAXY IPC-PD控制器、电台电源等集成在机箱内,安装于电气房。移动站设备包括 GALAXY IPC-VT控制器、电源模块、2 个 GPS 天线和 2 个数字电台及天线。GALAXY IPC-VT控制器集成具有组合测向的高精度定位测向的接收板卡和嵌入式控制板,该控制器采用了防水和防尘封装, 适合于船厂使用环境。GALAXY IPC-VT的两个测向天线根据机械的具体情况确定安装位置,并保证基线大于2m。GALAXY IPC-VT控制器、电台、电源模块等集成在机箱内,安装于电气房。 移动站分系统同时接收中心 监控分系统发送过来的安全报警与控制指令信息,从而提醒司机避免事故的发生,并自动通过PLC实现塔吊行走台车的行走速度减速、 停止及起重臂回转减速、停止等控制。起重机移动站采用GPS和编码器融合定位、侧向模式,相互校准,提高定位、侧向可靠性。
建立基于无线数字电台的GPS差分数据无线播发网络,利用无线数字电台实现机械位置(含悬臂姿态)以及报警自动控制指令信息的数据双向通讯。
龙门吊位置定位:利用一台GPS定位,实时准确检测机械的中心位置,并与编码器及机械尺寸结合,确定整个龙门吊的三维空间位置。
塔吊位置定位:利用两台GPS的定位,实时准确检测到机械的定位位置以及塔身、起重臂的姿态,并与编码器及机械尺寸结合,确定塔吊的三维空间位置。
GPS与编码器融合,当GPS信号受到遮挡时,可通过编码器信息保证定位的连续性;CMS预警信息显示实时将预警信息发送PLC,当设备可能产生碰撞时CMS显示预警,并记录预警信息。实时监控:在中控室提供集中的塔吊、龙门吊位置的实时可视化直观显示;以电子地图为背景实时显示各塔吊(包括塔身及起重臂)、龙门吊的当前位置。
当塔吊接近或者穿过龙门吊将要发生碰撞时或是两台塔吊行走台车间距离以及起重臂顶端的间隔距离小于相关设定值时进行报警提示,通过PLC控制塔身或起重臂的移动,防止碰撞发生。当塔吊或者龙门吊吊运物体移动靠近地面障碍物时进行报警提示,通过 PLC 控制停止。对机械的定位与作业状态信息进行自动存档,可对任意时段的历史数据进行查询回放,同样以可视化地图形式展示机械的作业过程。
防碰撞系统根据位置信息和机械状态信息动态监控,并对各机械之间的位置关系进行实时判断检测,当龙门吊及塔吊操作人员、指挥人员发生违章作业,进入危险防撞预设距离时,系统会自动进行安全制动,防止发生碰撞,从而保证设备的安全使用。
根据造船厂吊装需要,起重机安全监控系统提供船厂的多台塔吊以及龙门吊的防碰撞需求利用GPS高精度定位,实现相邻机械间的防撞自动控制,并提供了直观的图形化仿真监控软件,实时及事后回放机械作业动态情况。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
