专注起重机安全监控管理系统为工业安全行业保驾护航!


建筑工地上安全是重中之重,而塔吊作为施工基础机械,保证它的安全运转是正常施工的前提。
塔吊是建筑工地上最常用的一种起重设备,用来起吊运输钢筋、木楞、混凝土及钢管等施工材料,由于是高空作业,对相关人员素质及工作环境要求较高,但是,碰撞事故并不少见,碰撞的发生不利于施工的高效有序开展,必须加强防碰撞监控,引入先进安全保护系统,从而不断提升塔吊施工安全系数,减少生命财产损失。
1塔式起重机防碰撞理论研究
塔式起重机防碰撞监控与安全保护系统是在相关理论研究的基础上建立起来的,必须保证科学性、合理性,才能保证系统的可行性。塔吊防碰撞算法是重要的理论支撑,常见的有风险预估法和实时位置计算法,风险预估算法主要考虑了塔机的运动惯性,通过分析臂架回转运动速度、小车变幅运动及相关静态参数,同时充分考虑塔机制动性能,计算出一个安全区域。实时位置计算法是根据塔吊实时状态数据计算相对位置进行判断的,比如, 如果高位塔机起升钢丝绳与低位塔机平衡臂或起重臂的距离小于报警距离,那么就会触发警报,及时采取防碰撞措施,该算法需要建立空间坐标系,或者将三维问题投影到平面上变成二维问题。以上两种方法在实际应用过程中均存在一定的缺陷,所以越来越多的新算法得以运用,比如,基于向量计算的防碰撞算法、基于回转制动的防碰撞算法,以及基于传感器直接监测塔机间距离的方法,都得到了一定的发展。除了塔机间的防碰撞问题,塔机与障碍物之间的防碰撞研究也至关重要,需要通过先进技术和系统的运用提高防碰撞水平,实现施工现场的现代化、信息化安全监管。
2塔式起重机防碰撞监控与安全保护系统分析
2.1 一种塔吊吊装防碰撞装置
塔吊的吊钩和吊钩臂在工作的过程中,通过吊绳下降到地面吊取物品,吊钩臂在移动的过程中容易出现晃动,尤其是在吹风的过程中,吊钩臂极易碰撞到周围的建筑物或工作人员,出现危险。图1为塔吊吊装防撞装置的侧视图,图2为塔吊吊装防撞装置的主视图,下面将根据图示对该防碰撞装置进行分析。

如图所示,吊钩臂1的下端设置挂钩,吊钩臂1的上 端连接吊绳,吊钩臂1的正面和背面上均设置有防撞板10,吊钩臂1的正面和背面中部均设置有超声测距传感 器6,防撞板10的中部开设有与超声测距传感器6对应 的通孔,避免妨碍超声测距传感器6采集信号,吊钩臂1 的上端通过支架设置有太阳能板8,利用太阳能发电,吊钩臂 1 的 上 端 设 置 有 控 制 器,采用搭载C51单片机的PCB板,控制器设置在壳体内,壳体内设置有无线模块和太阳能电池,无线模块的天线2设置在壳体的上端,太阳能板8、超声测距传感器6、无线模块和太阳能电均与控制器电连接。超声测距传感器6采用BXUAN-M30超 声波测距位置探头,无线模块采用 LTE-LTE-364型无线通信物联网模块。
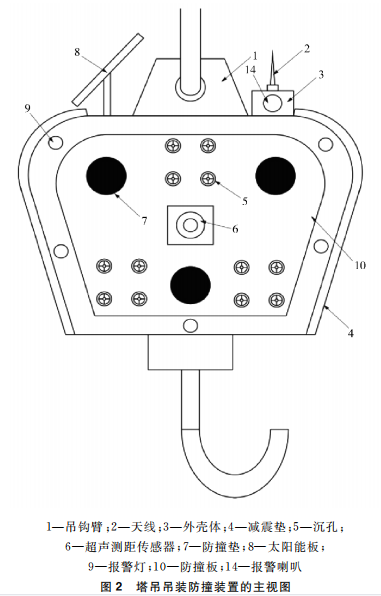
该装置在吊钩臂1上安装有报警、预警和防撞装置, 吊钩在移动的过程中,通过超声测距传感器6时刻检测两侧距离物体的距离,当吊钩臂1距离物体过近时,通过 无线模块将信息及时反馈给塔吊司机,以避免危险。若发生碰撞,防撞板10在碰撞的过程中能减少对吊钩臂1 的冲击,避免吊钩臂1在多次碰撞之后出现损坏,系统通过太阳能供电,并通过无线信号进行传输,无需单独搭接电线,使用方便。
防撞板10的表面设置有若干防撞垫7,防撞板10与吊钩臂1之间设置有若干减震机构。减震机构包括设置 在吊钩臂1上的定位柱13,定位柱13上活动套设有滑筒 12,滑筒12固定在防撞板10上,滑筒12的端部与定位 柱13之间设置有弹簧,且弹簧套在定位柱13上。
吊钩臂1在出现冲撞时,防撞垫7能有效减少冲击, 同时防撞板10具有减震的机构,在保护吊钩臂1的同时, 对冲撞物体也能进行保护,减震机构在工作的过程中,通过定位柱13和滑筒12配合进行伸缩,弹簧吸收冲击力。
滑筒12通过支撑板11与防撞板10连接,支撑板11的四个角通过螺栓与防撞板 10固定连接,且防撞板10的表面设置有安装螺栓的沉孔5,支撑板11连接防撞板10,提供良好的支撑,连接稳 固,当防撞板10出现损坏时,可进行更换。
防撞板10的尺寸小于吊钩臂1的尺寸,吊钩臂1边 沿设置有若干报警灯9,若干报警灯9均匀分布在防撞板10的周围报警灯9与控制器电连接。外壳体3上设置有报警喇叭14,报警喇叭14与控制器电连接。吊钩臂1的两侧面均设置有减震垫4,用于对吊钩臂1的侧面进行保护。在吊钩臂1上设置报警灯9,当靠近工作人员或物体时,报警灯9闪 烁,提醒工作人员避让或撤离,同时报警喇叭14发出警报,确保达到报警效果。
2.2一种塔吊环境安全监控系统
由于塔吊的在高空作业,现有的塔吊都需要塔吊司机上到塔吊上进行操作,塔吊对工作环境的要求很严格,在大风大雨的时候不能工作,并且在能见度低的情况下也不能工作,存在安全风险,所以需要一种监控塔吊工作环境的设备。图3为塔吊工作环境监控示意图,图4为塔吊工作环境监控夹块示意图,下面将根据图示对该监控与安全保护系统进行分析。

如图3、4所示,安装座12的下端设置有夹块14,安装座12的上端设置有控制箱10,控制箱10的上端设置有雨量传感器17、风速风向传感器19和振动传感器20, 雨量传感器17安装在减振座18上,避免因为塔吊的振动导致雨水从中洒出,导致监测数据出现较大误差,风速风向传感器19安装在支撑杆13上,支撑杆13的上端设置有安装板16,风速风向传感器19固定在安装板16上。粉尘传感器15采 用GP2Y1014AU型粉尘传感器,雨量传感器17采用 RS-05B型雨量计量传感器,风速风向传感器19采用RS-FX型风向风速传感器变送器,振动传感器20采用 CT1005L 振动加速度传感器,控 制 器 采 用 搭载C51单片机的PCB板。
振动传感器20的下端设置有套筒,套筒设置在支杆8上,且套筒与支杆8螺纹连接,安装和拆卸均方便,安装座12的下端设置有粉尘传感器15,粉尘传感器15、雨量传感器17、风速风向传感器19和振动传感器20均与控制箱10内的控制器电连接,控制器通过无线信号模块与地面的监控中心无线连接。控制箱10上设置有触控显示屏11,触控显示屏11与控制器电连接,控制箱10的两侧通过支架设置有太阳能板9,控制箱10内设置有太阳能电 池,太 阳 能 板9和太阳能电池均与控制器电连接。控制 箱10的触控显示屏11可现实监测的各类环境数据,并且通过触屏显示屏可对整个系统进行调试;整个系统利用太阳能供电和无线数据传输,无需搭接额外的线缆,安装方便。
夹块14为开口向下的 C形夹块5,C 形 夹块5上活动设置有夹持块4,夹持块4贯穿 C形夹块5的两侧,夹持块4的一端设置有第一挡块6,另一端设置有拉手1,夹持块4的中部设置有第二挡块3,且第二挡块3位于C形夹块5内,C形夹块5的两侧均设置有条形通孔,夹持块4穿过两侧的条形通孔,第二挡块3的一侧与C形夹块5之间设置有弹簧2,C形夹块5的下端设置有限位凸台7,限位凸台7向C形夹块5内侧延伸,且限位凸台7与C形夹块5的侧面垂直,第二挡块3与 C形夹块5进行夹持,并通过弹簧2提供支撑力,拆卸时只需拉动拉手1就可实现松开夹块14,操作方便、简单,且限位凸台7进一步对 C形夹块5进行限位,避免脱落。
该系统安装在塔机上,对塔机的周围的环境进行监控,确保塔机在允许的条件下工作,避免在大风、大雨等恶劣条件下进行工作,确保安全。安装座12通过夹块14安装在塔机上,雨量传感器17用于监测下雨量的大小,风速风向传感器19用于监测风量的大小,振动传感器20用于监测塔吊的振动情况,并将监测的信号发送给地面的监控中心,当出现大雨、大风等恶劣天气情况时,及时通知塔吊司机停止工作,下降到地面。通过对塔吊的振动进行监控,判断塔机是否能够平稳工作,督促塔吊司机操作规范。粉尘传感器15用于监测环境中的粉尘浓度,为工地环境治理提供科学参考[4]。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
