专注起重机安全监控管理系统为工业安全行业保驾护航!


1.前言
在当前“中国制造2025”的大背景下,国内工业进入了新的阶段,显著地特征就是越来越依赖于自
动化、智能化生产,越来越倾向于流水线生产作业.在工业生产过程中,电动葫芦越来越得到广大国内汽车行业和轻型企业的认可与支持,它具有体积小、重量轻、结构紧凑、操作方便和安全可靠等优点、尤其是具备自动运行的多功能电动葫芦,市场前景十分广阔.目前国内部分厂家已经研制出第一代国产小车,但其功能单一、可靠性不稳定,市场认可度不高.本文针对轻型起重行业需求设计了一种载重量为5吨的小型化、智能化、多功能电动葫芦控制系统,其功能性和可靠性都有所增强.
2.系统组成
5T智能电动葫芦由起升部分和行走部分组成,整体结构如图1所示.起升部分电机采用双速制动减速电机,通过改变电机极对数实现提升速度为6:1关系的快慢两个速度,快速与慢速结合使用达到了真正意义上的操作便捷迅速,定位准确,行走部分电机采用变频制动减速电机,通过变频器控制,实现高低速切换,可满足电动葫芦行走速度要求.
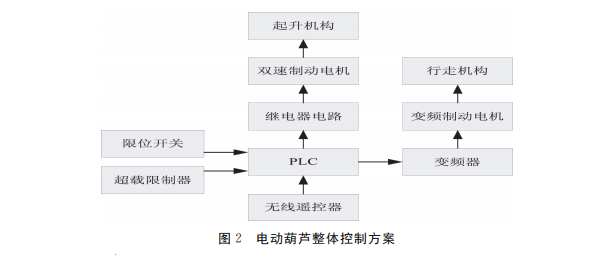
整个电动葫芦采用无线遥控和PLC自动程序加以控制,所以分为手动和自动控制两种模式.手动控制通过无线遥控器实现,完成基本操作:上升、下降、前进、后退四个过程的双速控制.自动控制通过 PLC 程序实现,主要完成客户要求的特定工序或是特定功能的操作,可根据不同的客户使用要求定制.整体控制方案如图2所示.PLC接收无线遥控器信号,对起升机构和行走机构进行方向速度控制,通过编码器和限位开关进行位置控制和保护,手动与自动模式通过遥控器按键实现切换,整个控制系统对工作过程中的超载、过流、过热等突发情况进行相应的保护.如果出现紧急事故,可按下遥控器上的急停按键,使设备停机。
3 电气控制系统设计
3.1
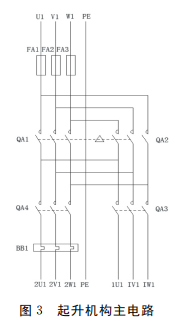
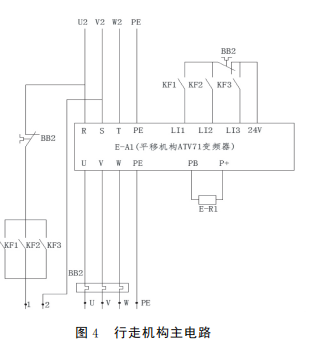
主电路设计对于起升电路而言,如图3所示,QA1为起升电机上升触点,QA2为下降触点,QA3为低速运行触点,QA4为高速运行触点.通过控制接触器的触点可实现起升电机的上升高低速与下降高低速运行,而高低速对应的三相电 U、V、W分别接到起升电机接线盒的对应位置.从而实现改变电机接线方式调速的目的.对于行走电路而言,如图4所示,变频器 ATV71控制行走电机运转,KF1为电机前进触点,KF2为后退触点,KF3为高低速切换触点.通过控制继电器的触点可实现行走电机的前进高低速与后退高低速运行.高低速数值可通过变频器内部设置.起升与行走部分都配有制动控制模块,当设备运行时,制动模块通电,电磁制动器吸合,电机可正常运行;当设备停机或不正常时,制动模块断电,电磁制动器抱闸电机,使电机不会意外反转,从而保护货物与人身安全。
3.2 控制电路设计
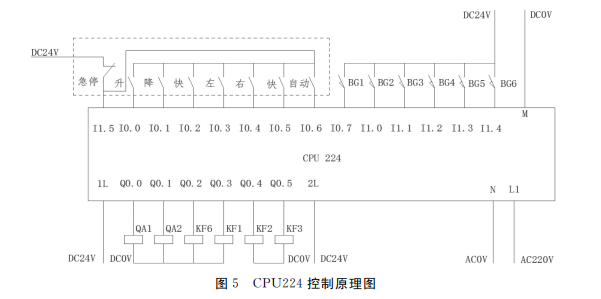
控制电路主要由 PLC 控制模块和线路控制模块组成. 对于 PLC控制部分,无线遥控器控制 PLC,实现手动和自动功能.手动控制方面,无线遥控器通过发射模块发出动作指令,接收模块接收指令,并控制 PLC进行起升、行走的方向与速度调节;自动控制方面,针对电动葫芦特定工序或特定功能,按照一定轨迹周期运行,PLC 内部编有自动运行程序,通过遥控器按钮实现自动与手动功能切换.如图5所示.虚线部分为遥控器接收模块,其信号输出到 PLC 输入端,以便于手动控制.其中,自动按钮可进行模式切换,急停按钮可使设备紧急停机.BG1-6分别为起升机构和行走机构限位开关.QA1、QA2、KF6分别为起升电机上升、下降和高低速线圈.KF1、KF2、KF3分别为行走电机前进、后退和高低速线圈.
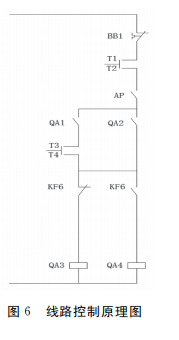
对于线路控制部分,如图6所示,KF6为起升电机高低速选择触点,KF6线圈得电时,常闭触点断开常开触点闭合 QA4得电,此时为上升高速或下降高速;反之线圈失 电 时,为上升低速或下降低速.QA1、QA2、KF6的线圈由PLC控制.T1T2为起升电机温度传感器引入线,当温度传感器报警时触点断开,控制电路切断,起升电机停止工作.AP为电源监测模块触点.T3T4为起升超载限制器引入线.3.3 电气保护控制本文设计的5T 智能电动葫芦拥有完善的电气保护功能,保障人员安全,设备稳定可靠.除了常规的短路、断路、热继电器保护外,本设计还采用了以下保护控制措施.
(1)电机过流过热保护.起升部分与行走部分采用的电机都可在内部加装过流与过热保护装置,并将装置的引出线 T1T2串 于 电 机 控 制 电 路,一 旦出现温度过高或是过流情况,可直接切断控制电路.
(2)设 备 电 源 保 护.配 备 电 源 保 护 器,用于三相电源保护,监测相序、缺相、相不平衡、过压和欠压.该保护器接入电源控制回路,有故障时立即动作,控制触头 AP切断电路交流接触器线圈电源,从而达到交流接触器主触头动作,对负载进行保护.
(3)限位保护.当电动葫芦运行到上下前后极限位置时,需要有限位开关进行保护.起升部分采用四级可调式旋转起升限位开关,限位开关与卷筒相连,通过配合将卷筒转数传递到限位装置,最终输入到PLC,可设置不同的转数来完成下限位—下速度切换—上速度切换—上限位的四级定位切换功能;行走部分采用十字钩叉限位器,可以起到控制电动葫芦前后极限位置的作用.
(4)超载保护.在使用电动葫芦作业过程中,可能会出现超载现象,需要配备超载限制器进行保护.它由电阻应变传感器和信号控制器两部分组成.将传感器部分装在一根钢丝绳上,测量钢丝绳所承受的载荷,并将数据传送给控制器部分.将控制器触点引入线串联在上升控制电路中,如果过载将发出报警信号并把触点断开限制葫芦继续提升重物.此时吊钩只能向减小负荷的方向动作,不能向增加负荷的方向动作,对电动葫芦起到安全保护的作用.
4 PLC程序设计
4.1 手动自动切换
电动葫芦手动、自动工作方式是通过遥控器按钮进行切换的.当系统上电后,默认为手动状态,此时通过遥控器按钮控制电动葫芦完成手动操作;如果需要进入自动操作模式,按下遥控器上的切换按钮即可切换成自动控制模式.如果需要再次变为手动控制方式,可再次按下切换按钮或按下急停按钮重启遥控器即可.遥控器有相应的互锁设置,避免自动、手动的相互干扰.
4.2 自动循环方式在自动程序设计过程中,需要注意以下几点事项:
(1)手动/自动互锁:系统上电默认为手动状态;主控线圈得电时,其常闭触点断开,常开触点闭合,转为自动状态.两者是互锁的,独立进行,互不干扰.
(2)顺序延时:为满足自动程序连续运行的特性要求,对应支路分别串联了接通延时定时器,每个定时器的常开触点作为程序顺序运行的触发信号,常闭触点作为自身复位信号,起到了桥梁纽带作用.
(3)高低速切换:竖直方向的高低速切换控制逻辑保证吊钩在下速度切换与上速度切换之间运行
时,起升电机为高速挡;在其余两端区间运行时,起升电机为低速挡.这样可以保证电机在达到上下极限时,减轻负载冲击.
(4)自动控制起点:由于自动控制模式是依据工作现场特定的工序或功能而设计的,所以在执行自动模式之前,需要将吊钩的位置手动调整到循环起点处.
5系统平台搭建
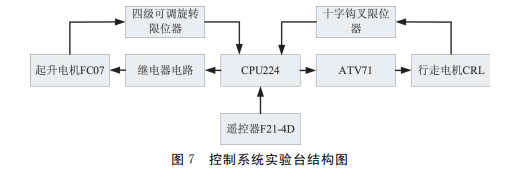
根据产品设计要求,本文搭建了5吨电动葫芦自动控制系统,其主要结构如图7所示.起升电机采用博能双速制动 电 机,型 号 为 FC07,额 定 功 率 为 6.1kw.行走电机采用博能变频制动电机,型 号 为CRL37,额定功率为0.55kw.控制器选用西门子 PLC200系列,具体为 CPU224—AC/DC/继电器型.变频器采用施耐德异步电机变频器 ATV71,控制行走电机速度.遥控器选用禹鼎成套遥控产品,型号为F2-4D,可将开始键设置为复用功能,用作手动/自动切换.对上述系统编写自动控制程序,使其按照如下顺序自动循环运行:下降—停止—向右—停止—上升—停止—下降—停止—向左—停止—上升—停止—下降.结果表明,电动葫芦自动运行准确平稳,自动与手动功能切换自如,性能可靠.
结 语
这次的更新变动可以说是在电动葫芦领域跨上了一个台阶,相信以此为基础,工业安全生产会更快速更好的发展下去。



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
