专注起重机安全监控管理系统为工业安全行业保驾护航!


船厂起重机群概念的提出及安全监控的必要性:
为满足生产需要,提高生产效率,一般在船厂船台、船 坞或码头,都密集布置着形式各异的起重机,独立或协作工 作,主要包括门座起重机和门式起重机两种。门座起重机一 般布置在门式起重机的下方或两侧,形成船厂起重机群。 尽管形式各异的起重机均运行在各自的轨道上.但由 于多台起重机密布、起重机之间的距离较近或司机视野盲 区等因素,起重机之间存在相互干涉的危险,导致起重机 发生干涉事故,因此本文研究船厂起重机群安全监控管理 系统的问题,为避免起重机发生干涉,实现船厂起重机群 安全监控显得非常有必要。
船厂起重机群安全监控管理系统初步模型
按照《起重机械安全监控管理系统》要求,起重机自 身的安全监控管理系统已安装,在此基础上,为解决起重 机群干涉问题。可在已有的起重机安全监控系统中增加一 个界面。该界面可在起重机群界面和本地起重机位置界面之间进行切换显示。起重机群界面包括群内所有形式各异 的起重机.本地起重机界面仅包括起重机本身和可能与其存 在干涉的其他起重机显示在同一个界面内,且以本地起重机 为主,处于界面中间,可通过显示不同的颜色进行区分。当发 生本地起重机与某一台起重机接近至警戒范围时,除了监 控管理系统向操作人员发出报警信号和在醒目位置采用 文字提醒外.在安全监控系统群界面或本地起重机界面也 可以直观的看到存在干涉危险的起重机。并采用颜色加以 区分,如果可能发生干涉的区域进一步缩小,可通过安全 监控系统强制将两台设备停机.也可通过旁路进行人为操 作。如有新的起重机加入到该起重机群,可通过技术手段 将其纳入到该管理系统中。
起重机群安全监控的实现
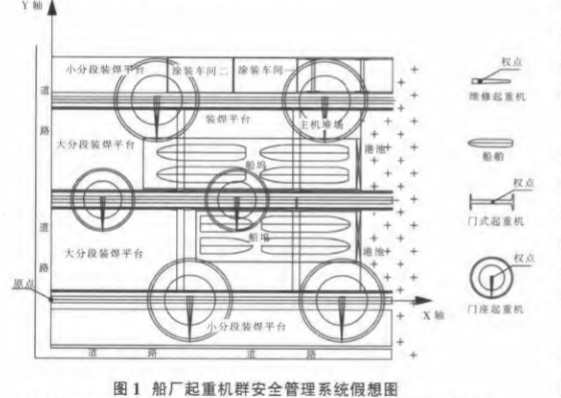
船厂起重机均运行在固定的轨道上,两台门式起重机 靠近时存在干涉的危险,门式起重机和门座起重机即使相 对位置较远.但由于门座起重机臂架幅度变化或转盘旋转 角度变化将可能造成两机发生干涉,所以要实现起重机群安全监控,必须解决两个问题,一个是起重机的相对位置, 另一个是起重机的活动范围,以此两个因素来判断是否存 在干涉的危险性。 相对位置解决方案:在每台起重机上设置一个权点. 来虚拟起重机的位置.起重机的移动即权点的移动,门式 起重机设置在主梁中间,门座起重机设置在回转中心,通 过模拟的形式以权点扩展出起重机的外形轮廓.将起重机 群分布在一个虚拟的平面坐标系内.如图1所示。
起重机运行在各自的轨道上,通过运行机构编码器进 行坐标数据采集,或通过GPs定位的方式采集权点坐标,然 后反馈到虚拟的坐标系上。 活动范围解决方案:对于门式起重机来说,除维修吊 外,小车一般运行在跨中,活动范围不会超出起重机跨距; 对于门座起重机来说,尾部半径是一个固定值.但臂架的 幅度和转盘的旋转角度在工作过程中会经常发生变化,即 它的活动范围处于变化状态,即使两机间距较大,也可能 由于臂架幅度或转盘角度变化就会发生与周围其他起重 机或环境产生的干涉,所以必须提取臂架的幅度和转盘的 旋转角度数据,结合两机的间距,再通过逻辑运算确定门 座起重机的活动范围。 如果是门座起重机布置在门式起重机下方的,则通过 两机相对位置、门座起重机幅度、门座起重机转盘的方向 以及门式起重机的小车位置等条件进行判断是否两机存 在干涉的危险。 如果门式起重机在停机维修的状态。其上用于维修的 起重机采用门座起重机的方式处理即可。如果是起重机遇 到建筑时,只需将建筑物的坐标位置在该系统内设定。也可 以通过以上方案进行安全处置。因此可得出起重机群安全 监控管理系统通用因素公式: 干涉区域=起重机间距+门座起重机(或维修吊)旋转角度+门座起重机(或维修吊)臂架幅度+门式起重机上小 车位置+门式起重机下小车位置+建筑物位置。 定义:干涉区域为F:起重机间距为L,两机沿轨道最 大轮廓分别为L1、L2,即L=L1+L2;门座起重机(或维修吊) 转盘角度为0【;门座起重机(或维修吊)臂架幅度为B;门式 起重机上小车位置为a;门式起重机下小车位置为b;建筑 物位置为h;通用因素公式可简写为:F-L+仅+B+a+b“。如 门座起重机与门座起重机则公式简化为:F=L+d1+B1+d2+ B2“。如门座起重机与门式起重机则公式简化为:B ¨a+B“。如门座起重机与门式起重机(门座机在门 式起重机下方布置)则公式简化为:F-L斗n+B+a+b“。 如门式起重机与门式起重机则公式简化为:F-L+h。
举例说明:以门座起重机和门式起重机为例,假 设门座起重机在门式起重机外侧布置,门座机作为本地 起重机,采用通过公式F’-I桕+B+h来确定门座机干涉 区域,假设在无建筑物的情况下,公式简化为为:N斗 刚$,即门座起重机发生干涉的区域仅与两机的间距、 本机的臂架幅度和转盘旋转角度有关.通过对以上三 个影响因素进行逻辑运算。 判断L是否小于等于L1+L2,如确认则通过其 他两个因素判断本地门座起重机干涉区域,如图2 所示。
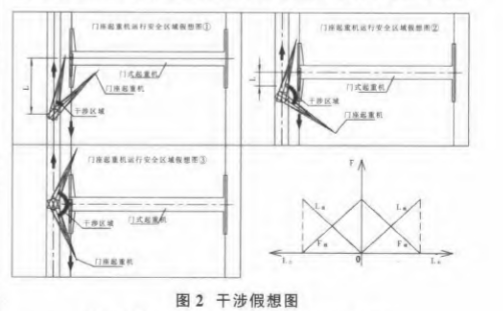
随着两台起重机逐渐靠近,即间距L逐渐缩 小,两台起重机发生干涉的区域越来越大,直到权点 处于一条线上时,发生干涉危险的区域最大.即有效 的工作范围最小。随着两机间距L逐渐增大,发生干涉的。
结束语
本文主要针对造船厂外场使用的门座起重机和门式 起重机所形成的密集性起重机使用情况下。可能存在干涉 的起重机之间的安全性提出的一种解决方案,能够预防起 重机工作过程中与其他起重机或周边环境产生干涉,希望 能够在船厂起重机群区域应用实施



158-3835-9688
中国•河南省国家大学科技园(东区)9号楼
